Dec
26
重量物ハンドリング遠隔操作荷揚台車の開発(株式会社東芝 中村 紀仁)
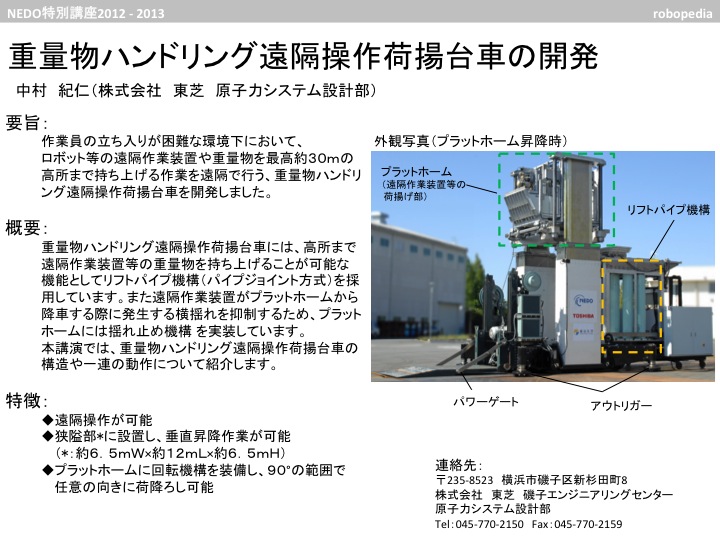 作業員の立ち入りが困難な有害汚染物質環境下にある設備において、階段、エレベータ等の移動手段に代わり、各種ロボット、各種資材等の重量物を各階に移送可能な「重量物ハンドリング遠隔操作荷揚台車」を開発した。重量物ハンドリング遠隔操作荷揚台車には、高所まで遠隔作業装置等の重量物を持ち上げることが可能な機能としてパイプジョイント方式を採用しており、また移送時に発生する横揺れを抑制するため、プラットホームに揺れ止め機構を実装している。本講演では、重量物ハンドリング遠隔操作荷揚台車の構造や一連の動作について紹介する。
作業員の立ち入りが困難な有害汚染物質環境下にある設備において、階段、エレベータ等の移動手段に代わり、各種ロボット、各種資材等の重量物を各階に移送可能な「重量物ハンドリング遠隔操作荷揚台車」を開発した。重量物ハンドリング遠隔操作荷揚台車には、高所まで遠隔作業装置等の重量物を持ち上げることが可能な機能としてパイプジョイント方式を採用しており、また移送時に発生する横揺れを抑制するため、プラットホームに揺れ止め機構を実装している。本講演では、重量物ハンドリング遠隔操作荷揚台車の構造や一連の動作について紹介する。
アイキャッチ画像