Mar
07
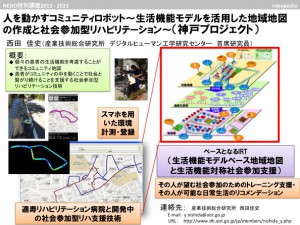
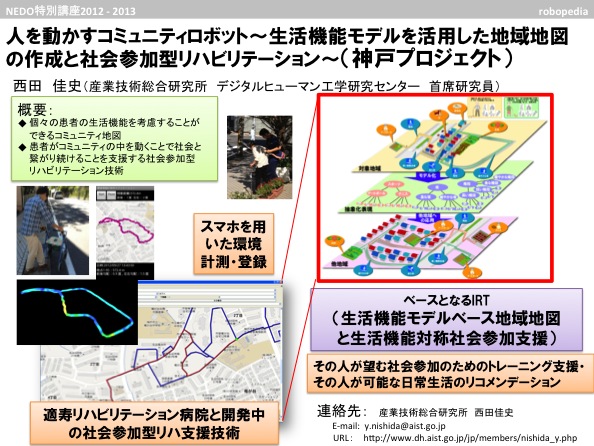
人を動かすコミュニティロボット~生活機能モデルを活用した地域地図の作成と社会参加型リハビリテーション~(産業技術総合研究所 西田 佳史)
 【概要】
【概要】
疾病をせずに、あるいは、障害を持たずに一生を終える人はいない。しかし,万人が経験する、生活機能低下時の生活のリデザインを支援する科学技術は存在しないために、軽度の生活機能低下であってもこれが深刻な閉じこもりや寝たきり状態に至る生活不活発病(廃用症候群)の問題が深刻化している。本プロジェクトでは、生活機能低下時の生活リデザインを可能とする科学技術開発と産業創造を、地域参加型研究アプローチ(CBPR)で進めている。本講演では、神戸市のリハビリテーション病院と協力し、個々の患者の生活機能を考慮することができるコミュニティ地図を作成し、これを用いて,患者がコミュニティの中を動くことで社会と繋がり続けることを支援する社会参加型リハビリテーション技術の開発とその展望を述べる。
アイキャッチ画像