May
25
ロボットミドルウエア標準:RTミドルウエア(産業技術総合研究所 安藤 慶昭)
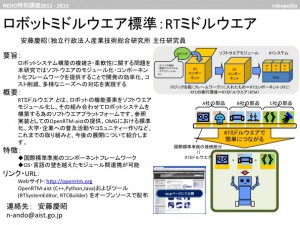
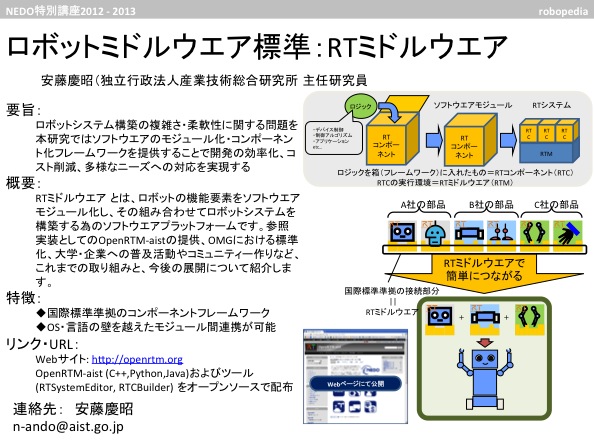 RTミドルウエア (RT-Middleware: RTM) とは、ロボットの機能要素をソフトウエアモジュール化し、それらを組み合わせてロボットシステムを構築する為のソフトウエアプラットフォームです。2002年度から始まったこのプロジェクトは、ロボットシステムの機能要素をモジュール化することで、コストの削減、最新技術の導入、多様なニーズへの対応を実現し、ロボットのシステムインテグレーションにおけるイノベーションを達成することを目的として開発が進められてきました。この目的のため、参照実装としてのOpenRTM-aistの提供、OMGにおける標準化、大学・企業への普及啓もう活動やコミュニティー作りなど、様々な取組が行われてきました。本講演では、RTミドルウエアの基本コンセプト、利点や導入実績、標準化含む様々な取り組みなどについて紹介します。
RTミドルウエア (RT-Middleware: RTM) とは、ロボットの機能要素をソフトウエアモジュール化し、それらを組み合わせてロボットシステムを構築する為のソフトウエアプラットフォームです。2002年度から始まったこのプロジェクトは、ロボットシステムの機能要素をモジュール化することで、コストの削減、最新技術の導入、多様なニーズへの対応を実現し、ロボットのシステムインテグレーションにおけるイノベーションを達成することを目的として開発が進められてきました。この目的のため、参照実装としてのOpenRTM-aistの提供、OMGにおける標準化、大学・企業への普及啓もう活動やコミュニティー作りなど、様々な取組が行われてきました。本講演では、RTミドルウエアの基本コンセプト、利点や導入実績、標準化含む様々な取り組みなどについて紹介します。
・ブラウザにGoogleアカウントを設定すると,ブラウザ上で発表資料がご覧頂けます.
発表資料(PDF)ダウンロード
アイキャッチ画像