Feb
01
SICE SI部門:モーションメディア コンテンツ コンテスト (広島市立大学情報科学部システム工学科 教授 岩城敏)
目標(対象者と教育目標)
コンテスト参加者は学生だけではなくメーカ・デザイナ・ベンチャー企業等異業種を含む。ロボット技術の育成だけではなく、作品(コンテンツ)として評価を行うことで、ロボット利用技術を習得・体験
セールスポイント
理系学生だけではなく、デザイン学科のセンスを活用
ビデオコンテンツのHPによる常時公開
概要
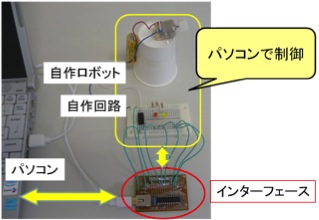
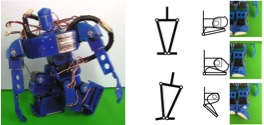
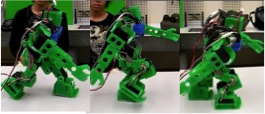
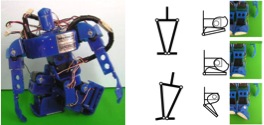
パーソナルロボットの価値の源泉を「実体の動き(モーション)」と捉え、これをフィーチャしたコンテンツ(モーションメディアコンテンツ)を競い合う
工夫点
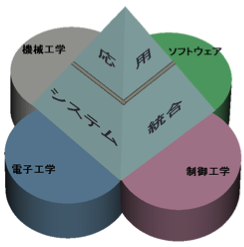
コンテンツを実現するロボット技術に関しては、主要ロボット関連学会にてOSを企画し、デザインと技術の両面からアプローチ
成果
一連の活動が、「ナビロボ」(カーナビ情報をロボットモーションでドライバへ提示)開発に繋がった
作成者、連絡先
計測自動制御学会SI部門モーションメディア部会
広島市立大学 岩城 敏 iwaki@hiroshima-cu.ac.jp