本セミナーの趣旨
東京大学ではNEDOの委託を受け、平成24年度から25年度にかけNEDO特別講座(ロボット技術経営)を実施しています。この講座はロボット技術を社会に導入するために、ロボットを社会に実装するための研究や技術のみならず、ソリューションや技術経営の観点から取り上げ紹介するとともに議論を深めます。
産業競争力懇談会COCN (Council on Competitiveness Nippon)では、国の持続的発展の基盤となる産業競争力を高めるため、科学技術政策、産業政策などの諸施策や官民の役割分担を、産官学協力のもと合同検討により政策提言としてとりまとめ、関連機関への働きかけを行い、実現を図る活動を実施しています。平成23年度及び24年度には、東日本大震災及び福島原発事故でその必要性がクロースアップされた防災ロボットとその運用システムについて提言をとりまとめております。
今回、特別講座では災害対応ロボットプロジェクトの平成24年度の活動をとりあげ、その周知ならびに議論を深めるために下記セミナーの開催を企画しました。多数の方のご参加をお願いします。
本セミナーの内容
- 防災ロボット、無人化施工システムに加え、インフラ点検/メンテナンスロボットとの併用も含め、災害対応ロボットの技術的課題抽出と、産業競争力を高めるための開発戦略に関する検討と提言
- 今後の災害の備えとして、災害対応ロボットを災害時に迅速に投入できるようにするための拠点構想と運用システムのあり方を具体的に示すとともに、防災ロボットの事業化の方策についての検討と提言
- 防災ロボット(WG1)、無人化施工システム(WG2)、インフラ点検/メンテナンスロボット(WG3)、運用システム及び事業化(WG4)に関するWGを設置し、各観点からの提言の内容に関する検討と提言
主催
独立行政法人新エネルギー産業技術総合開発機構、国立大学法人東京大学
協賛(予定)
産業競争力懇談会、一般財団法人製造科学技術センター、一般社団法人日本ロボット学会、同学会広域災害対応に関する技術基盤調査研究委員会、一般社団法人日本機械学会ロボティクス・メカトロニクス部門対災害ロボティクスタスクフォース
場所
東京大学(本郷キャンパス)工学部11号館講堂
http://www.u-tokyo.ac.jp/campusmap/map01_02_j.html
http://www.u-tokyo.ac.jp/campusmap/cam01_04_12_j.html
日時
平成25年4月23日(火) 15:00から17:40
参加費
無料、ただし懇親会にご参加の方は会費4千円です。
プログラム
15:00 – 15:10 挨拶
(独)新エネルギー・産業技術総合開発機構(NEDO) 真野 敦史
15:10 – 15:30 災害対応ロボットと運用システムのあり方~提言概要~
プロジェクトリーダー 東京大学 淺間 一
15:30 – 15:50 災害対応ロボットと運用システムのあり方:防災ロボットに関する提言
主査 東北大学 田所 諭
15:50 – 16:10 災害への備え 新しい無人化施工技術の提言
主査 鹿島建設株式会社 植木 睦央
16:10 – 16:30 インフラ点検・メンテナンスロボットの開発と災害対応転用について
主査 新日鐵住金株式会社 大石 直樹
16:30 – 16:50 防災ロボットの運用システム及び事業化について
主査 日本原子力研究開発機構 川妻 伸二
16:50 – 17:00 休憩
17:00 – 17:30 パネルディスカッション(仮題)
講演者全員
17:30 – 17:40 まとめ
18:00より、工学部2号館1階展示室にて懇親会(会費:4,000円)を予定しております。
産業競争力懇談会提言書
会場で配布する産業競争力懇談会の提言書のサマリーおよび、本文をご覧頂けます。
こちらをごらんください.
講演概要
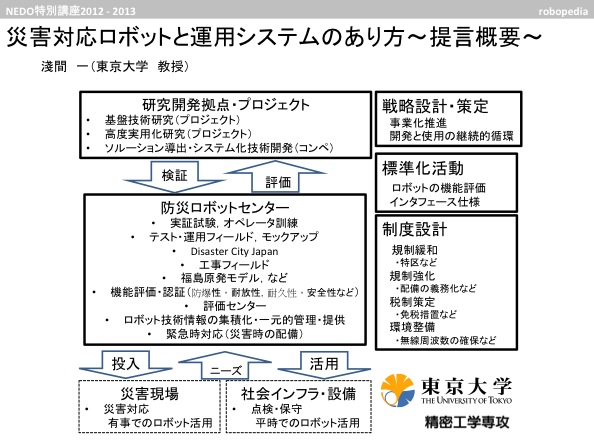
① 災害対応ロボットと運用システムのあり方~提言概要~:プロジェクトリーダー 東京大学 淺間 一
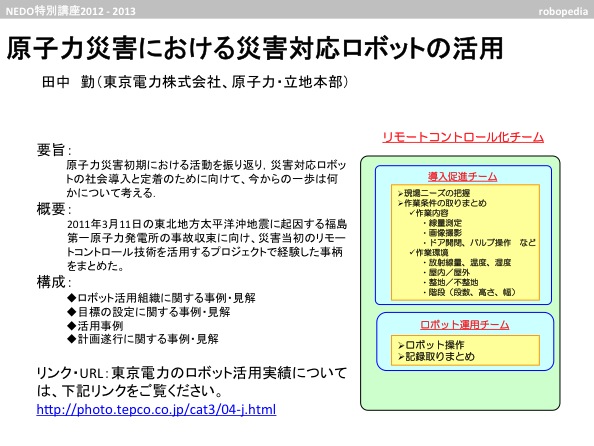
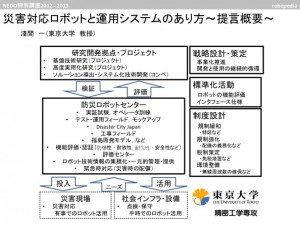 2011年3月11日に発生した東日本大震災とそれに伴って発生した東京電力株式会社福島第一原子力発電所の事故では、様々な場面においてロ ボットや遠隔操作機器の導入が求められた。福島原発の廃炉に向けて、すでに多くのロボットや遠隔操作機器が活用され、多大な貢献を果たしてい るが、緊急対応においては、必ずしも迅速かつスムーズにそれらが投入できたわけではない。
2011年3月11日に発生した東日本大震災とそれに伴って発生した東京電力株式会社福島第一原子力発電所の事故では、様々な場面においてロ ボットや遠隔操作機器の導入が求められた。福島原発の廃炉に向けて、すでに多くのロボットや遠隔操作機器が活用され、多大な貢献を果たしてい るが、緊急対応においては、必ずしも迅速かつスムーズにそれらが投入できたわけではない。
そこで、産業競争力懇談会プロジェクト「災害対応ロボットと運用システムのあり方」では、今後起こり得る自然災害、人工災害に対する備えとし て、いかなるロボット技術開発と運用を行うべきかについて検討し、防災ロボット、無人化施工システムに加え、インフラ点検/メンテナンスロ ボットとの併用も含め、災害対応ロボットの技術的課題抽出と、産業競争力を高めるための開発戦略に関する提言を行った。
本講演では、その概要について述べる。
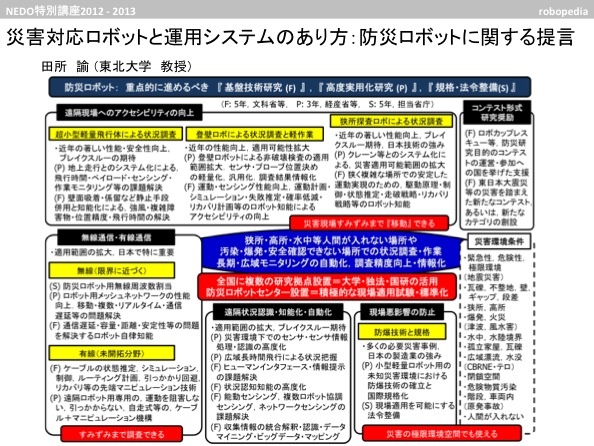
②災害対応ロボットと運用システムのあり方:防災ロボットに関する提言:WG1 主査 東北大学 田所 諭
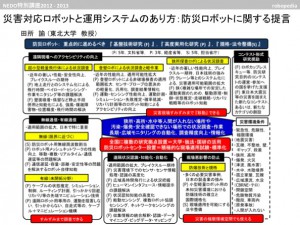 災害予防・緊急対応・復旧・復興と変化する災害の各フェーズにおいて、防災ロボットには、人間が入れない場所や危険性の高い場所で、人間に代わって遠隔的・自動的に状況調査や作業を行うことが求められている。それによって我が国の災害リスクを低下させることは、産業競争力の維持発展のために不可欠な要件である。本プロジェクトでは、それに必要な重点課題を検討した。
災害予防・緊急対応・復旧・復興と変化する災害の各フェーズにおいて、防災ロボットには、人間が入れない場所や危険性の高い場所で、人間に代わって遠隔的・自動的に状況調査や作業を行うことが求められている。それによって我が国の災害リスクを低下させることは、産業競争力の維持発展のために不可欠な要件である。本プロジェクトでは、それに必要な重点課題を検討した。
その結果を要約すると、重点的に研究開発を進めるべき技術として、下記が重要である。
・遠隔現場へのアクセシビリティ向上(特に、超小型軽量飛行体、登壁ロボ、狭所探査ロボ)
・ロボットによる現場悪影響の防止(特に、防爆技術・規格)
・無線通信・有線通信の問題点解決
・遠隔状況認識・知能化・自動化
・コンテスト形式による基盤技術研究の奨励
さらには、重点的に進めるべき規格標準化や、重点的に整備すべき組織・制度として、下記が重要である。
・ロボットの性能評価法の国際標準化
・部品の可換性のための国際標準化
・国際安全規格の整備
・全国に複数の研究開発拠点の整備
・防災ロボットセンターの開設
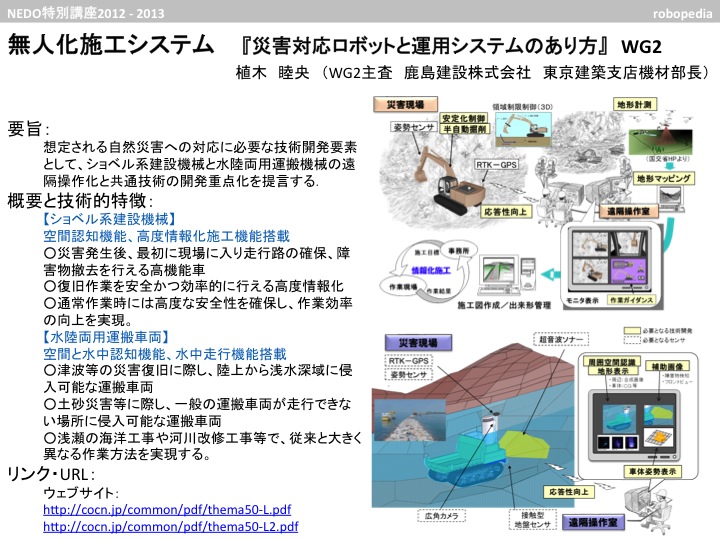
③災害への備え 新しい無人化施工技術の提言:WG2 主査 鹿島建設株式会社 植木 睦央
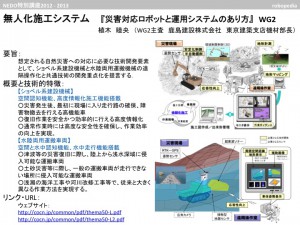 台風や集中豪雨、地震、噴火等によって発生する土砂災害の緊急復旧作業では、地盤状況の不安定さから2次災害の恐れがあります。作業に使用する建設機械を遠隔操作し、安全かつ円滑に復旧作業を行う無人化施工技術は、雲仙普賢岳の大火砕流(H2年)への対応技術として産声を上げ、有珠山の噴火、中越地震等への緊急対応を経てきました。福島第1原子力発電所の事故対応にもその技術が活かされています。
台風や集中豪雨、地震、噴火等によって発生する土砂災害の緊急復旧作業では、地盤状況の不安定さから2次災害の恐れがあります。作業に使用する建設機械を遠隔操作し、安全かつ円滑に復旧作業を行う無人化施工技術は、雲仙普賢岳の大火砕流(H2年)への対応技術として産声を上げ、有珠山の噴火、中越地震等への緊急対応を経てきました。福島第1原子力発電所の事故対応にもその技術が活かされています。
しかし、東日本大震災で生じた様々な被害の状況を振り返ると、この技術が対応できる範囲は非常に限られており、今後の災害への備えを考えるに当たり、必要な技術を新たに開発し、災害発生時に即座に対応できる運用体制の構築は必須のものと考えられます。
今回は、今後必要と考えられる建設機械のロボット化技術(ショベル系建設機械、水陸両用運搬車両)に関する技術開発要素と、実現のための制度的な課題等について報告します。
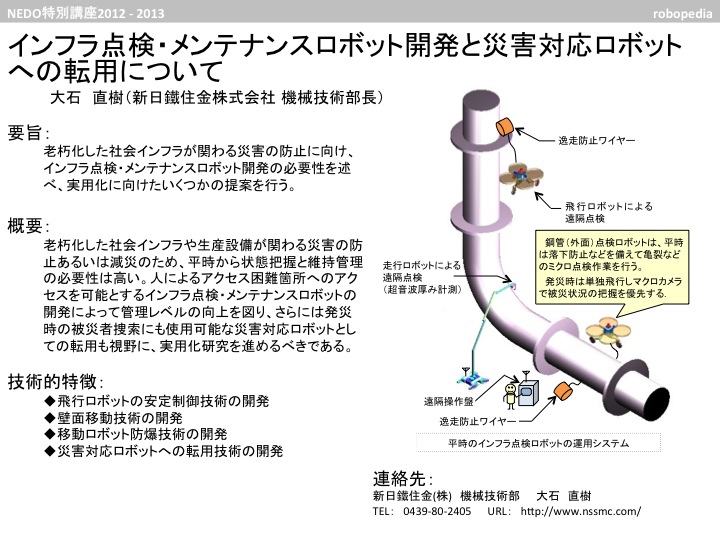
④インフラ点検・メンテナンスロボットの開発と災害対応への転用について;WG3 主査 新日鐵住金株式会社 大石 直樹
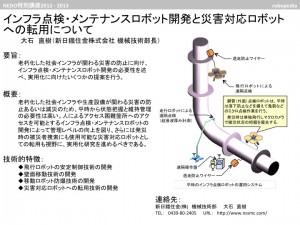 日本の社会インフラや生産設備の老朽化が進展している現状において、大規模災害防止のため、平時の設備状態把握と維持管理メッシュの適正化が求められる。人のアクセス可能範囲を超えてインフラ点検・メンテナンスを可能とするロボット開発のニーズは高い。
日本の社会インフラや生産設備の老朽化が進展している現状において、大規模災害防止のため、平時の設備状態把握と維持管理メッシュの適正化が求められる。人のアクセス可能範囲を超えてインフラ点検・メンテナンスを可能とするロボット開発のニーズは高い。
また、発災時には災害対応ロボットとして、被災者捜索や設備被害のマクロ把握に転用可能とする高度実用化研究も進める必要がある。
主な開発課題としては、アクセス困難箇所(高所、狭隘、悪性ガス環境等)へのアクセスを高度に可能とする、複合型アクセスシーズ開発(飛行/走行モード切替)や移動ロボット向け防爆基準策定とそれに即した防爆技術開発である。
さらにインフラ点検・メンテナンスロボットの開発・活用の拠点として、防災ロボットセンターの設置を提案する。ここでは、ロボットを安心して現場に投入できるように、平時から発災・復旧時まで全ての局面におけるロボット機能検証、性能評価、防爆機能認証の役割を持たせる。
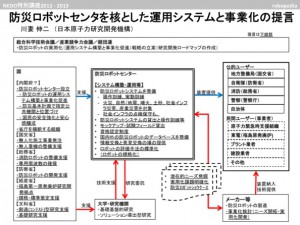
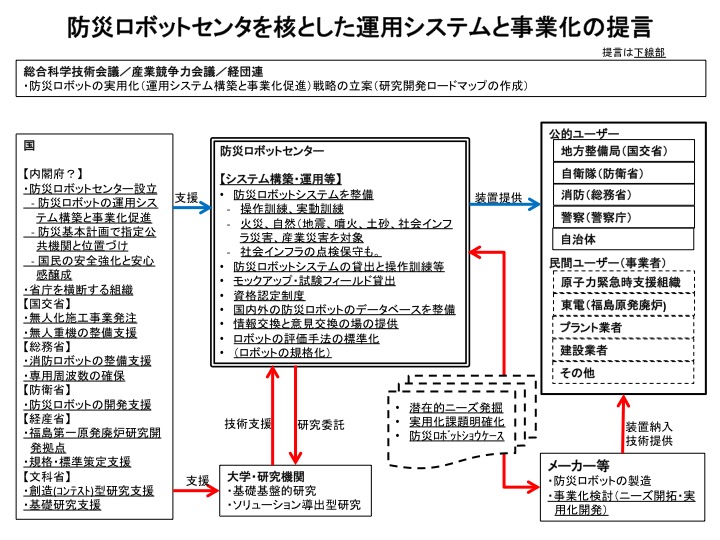
⑤防災ロボットの運用システム及び事業化について:WG4 主査 日本原子力研究開発機構 福島技術本部 川妻 伸二
 阪神・淡路大震災以来、大都市直下型地震やインフラ設備の老朽化に備え、災害対応ロボット等の必要性が叫ばれてきていたものの、災害対応ロボットの運用・事業化は殆ど進んでいなかった。実際、福島第一原子力発電所事故では、原子力災害ロボットが開発されていたにもかかわらず直ちに投入することはできなかった。
阪神・淡路大震災以来、大都市直下型地震やインフラ設備の老朽化に備え、災害対応ロボット等の必要性が叫ばれてきていたものの、災害対応ロボットの運用・事業化は殆ど進んでいなかった。実際、福島第一原子力発電所事故では、原子力災害ロボットが開発されていたにもかかわらず直ちに投入することはできなかった。
COCN災害対応ロボットと運用システムプロジェクト運用システムおよび事業化ワーキンググループ(WG-4)では、国内外の事例調査と今後に向けた提言を行った。真に使える防災ロボットの運用システムをつくりあげるには、防災ロボットセンターを立ち上げ、防災ロボットの試整備、試運用、解題摘出、改良という運用研究が必要である。また、防災ロボットの事業化には市場創出が必要であり、上述の防災ロボットセンターの防災ロボット等を、自治体の防災訓練や企業のインフラ点検に貸出すなどにより市場創出の可能性を探ることが重要である。






 阪神・淡路大震災以来、大都市直下型地震やインフラ設備の老朽化に備え、災害対応ロボット等の必要性が叫ばれてきていたものの、災害対応ロボットの運用・事業化は殆ど進んでいなかった。実際、福島第一原子力発電所事故では、原子力災害ロボットが開発されていたにもかかわらず直ちに投入することはできなかった。
阪神・淡路大震災以来、大都市直下型地震やインフラ設備の老朽化に備え、災害対応ロボット等の必要性が叫ばれてきていたものの、災害対応ロボットの運用・事業化は殆ど進んでいなかった。実際、福島第一原子力発電所事故では、原子力災害ロボットが開発されていたにもかかわらず直ちに投入することはできなかった。