7月2日 災害対応ロボットワークショップ開催のお知らせ
近年、国内外で発生している自然災害、インフラや産業施設の事故、原子力災害等に対して、災害対応ロボットの活躍が期待されています。
災害対応ロボットを社会で創り育て、定着させるためには、どのような技術や施策、国内外の協力体制の構築等の取り組みが求められるか、その議論を深めるための体系的ワークショップとして
“災害対応ロボットワークショップ(NEDO特別講座)”
を、下記の要領で開催します。
これはNEDO特別講座(ロボット技術経営)の一環として、本年度から来年度にかけて計画しているもので、災害対応ロボットを社会に実装するための研究や技術のみならず、ソリューションや技術経営の観点から取り上げ、紹介するとともに、議論を深めます。本年度まで実施されているNEDOの「災害対応無人化システム研究開発プロジェクト」についても取り上げてまいります。
本案内の最後の部分に今後の計画を記します。
なお、このワークショップの内容は、ロボットソリューションの体系的蓄積を念頭においたロボぺディアにアップロードいたします。本ワークショップへの多数のかたのご参画とともに、のちに後日ワークショップの内容を知っていただく上でも、特に、関連ロボット技術、ロボット教育、そして、ロボット技術経営の観点からも、このロボぺディアもあわせてご活用いただければ幸いです。
災害対応ロボットワークショップ全体像(敬称略)
9/3 火 北原成郎(熊谷組,無人化施工)
11/12 火 吉田智章 (千葉工大,移動ロボット)
1/7 火 浦環(東大,水中ロボット)
主催
独立行政法人新エネルギー・産業技術総合開発機構(NEDO)、国立大学法人東京大学
日時
2013年7月2日 15時40分から18時20分まで
場所
東京大学本郷キャンパス工学部2号館3階31A会議室
ご講演
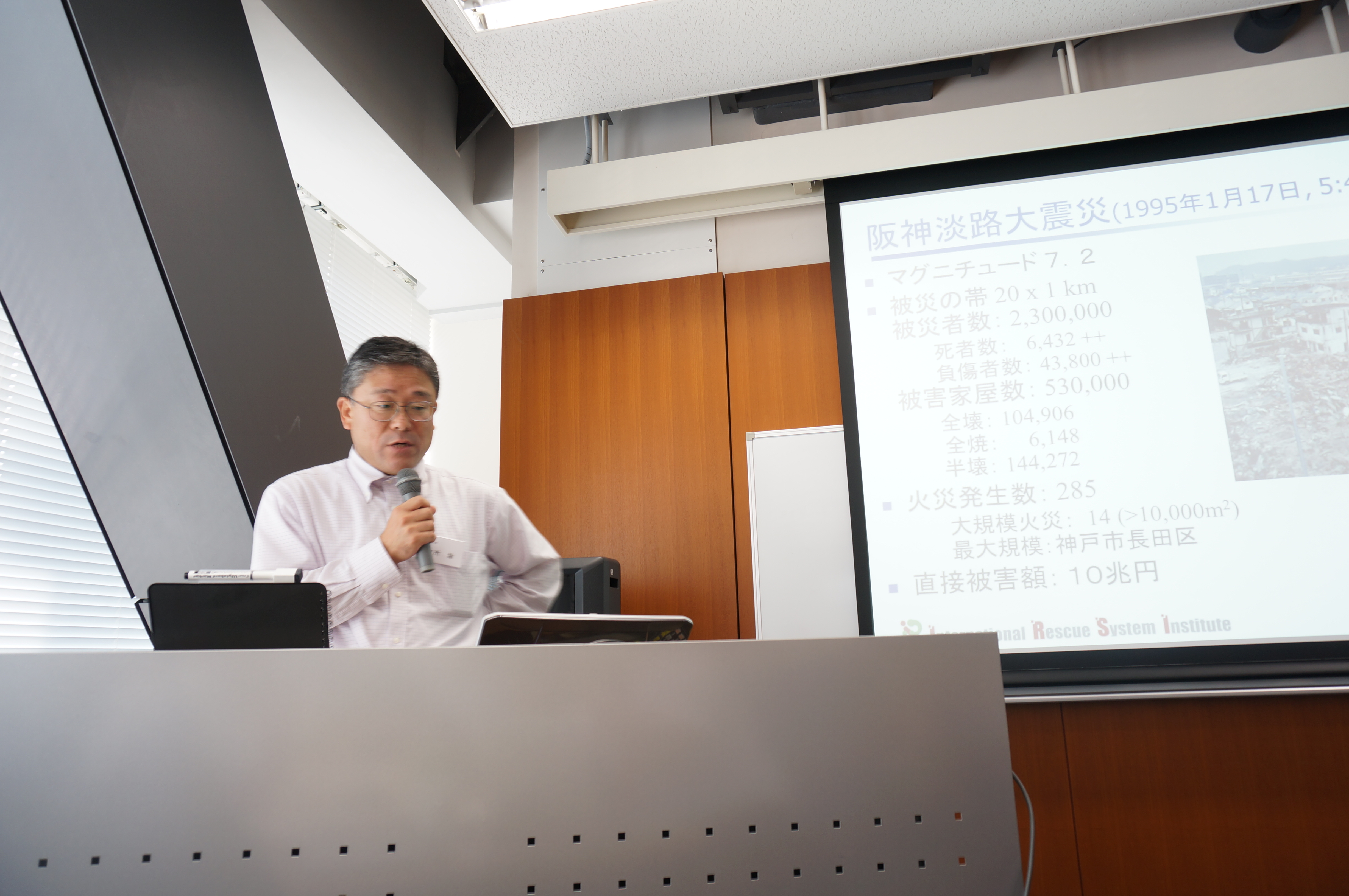
① Rescue and Disaster Robotics:東北大学 田所 諭
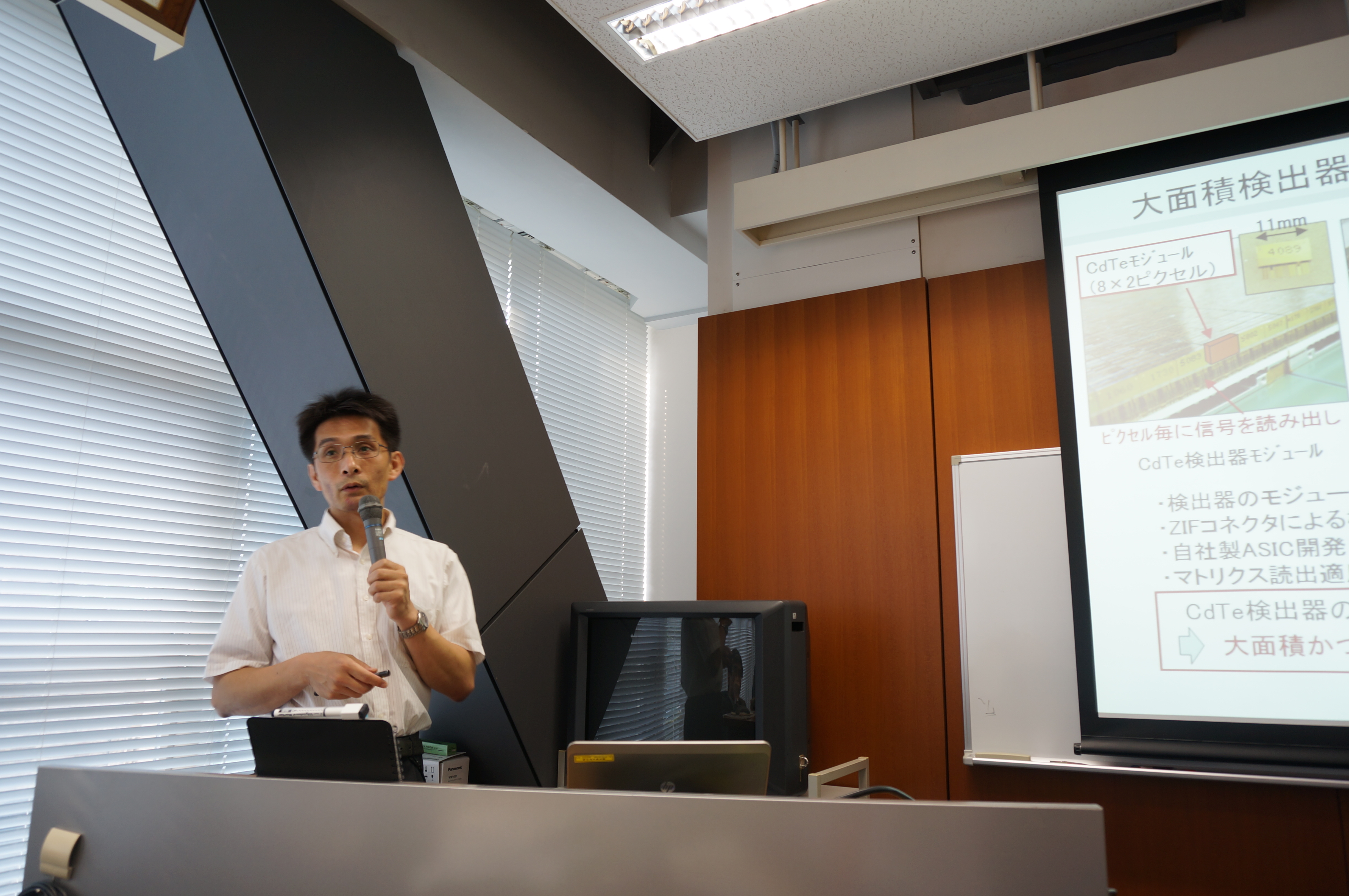
② 災害対応無人化システム研究開発プロジェクト「ガンマカメラの開発」:株式会社日立製作所 上野 雄一郎
③ 災害対応無人化システム研究開発プロジェクト「通信技術の開発」:株式会社日立製作所 花見 英樹
詳細
① Rescue and Disaster Robotics:東北大学 田所 諭
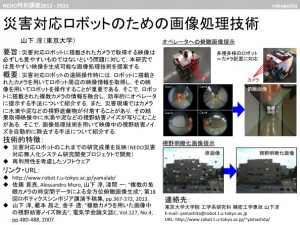
 我が国は世界でも有数の災害危険地帯に位置しており,防災ロボットに対するニーズが高い.本講演では,我が国における防災ロボットの研究開発をその黎明期から東日本大震災対応にわたるまで概観し,その課題を議論により明らかにしたい.
我が国は世界でも有数の災害危険地帯に位置しており,防災ロボットに対するニーズが高い.本講演では,我が国における防災ロボットの研究開発をその黎明期から東日本大震災対応にわたるまで概観し,その課題を議論により明らかにしたい.
② 災害対応無人化システム研究開発プロジェクト「ガンマカメラの開発」:株式会社日立製作所 上野 雄一郎
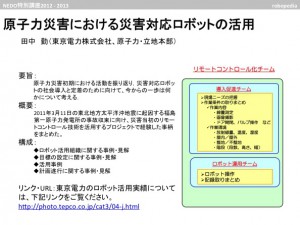
 福島第一原子力発電所の事故を受けて、ガンマ線強度分布を可視化するガンマカメラを試作し、原子力発電所内外において活用してきました。この度、NEDOプロジェクトに参画し、原子力発電所内のより高線量場に対応可能なガンマカメラを開発しましたので、開発したガンマカメラ及び試作機による適用事例等を報告致します。
福島第一原子力発電所の事故を受けて、ガンマ線強度分布を可視化するガンマカメラを試作し、原子力発電所内外において活用してきました。この度、NEDOプロジェクトに参画し、原子力発電所内のより高線量場に対応可能なガンマカメラを開発しましたので、開発したガンマカメラ及び試作機による適用事例等を報告致します。
③ 災害対応無人化システム研究開発プロジェクト「通信技術の開発」:株式会社日立製作所 花見 英樹
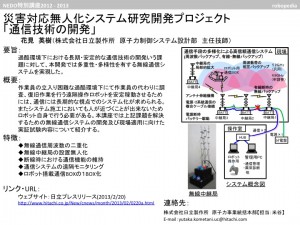 災害対応無人化システムにて開発される遠隔操作型移動装置が、長期的・安定的に制御・操作可能となるよう、多重性・多様性を有する無線通信システムを開発した。
災害対応無人化システムにて開発される遠隔操作型移動装置が、長期的・安定的に制御・操作可能となるよう、多重性・多様性を有する無線通信システムを開発した。
①無線LAN規格に適合する周波数から異なる2種類の周波数(5.2GHz、4.9GHz)で相互バックアップ可能な通信システム。
②無線通信中継局の運搬・設置・ケーブル接続を無人にて行い、電源供給、通信信号の安定的供給を可能とする。
③無線通信中継局間のケーブル断線が生じた場合でも無線でバックアップする有線/無線ハイブリッド方式。またバッテリーにより通信環境を維持可能とする。
④無線通信中継局の故障、中継局間のケーブル断線等の故障事象を管理用コンピュータにてモニタリング可能とする。
⑤ロボット搭載通信機器を1BOX化
参加登録
参加費は無料です
Event Registration and Ticketing Powered by Event Espresso
なお,当日は12時50分より,「RTM・RTCセミナー」を開催いたします.こちらも合わせてご参加ください.
当日,会場での登録も可能ですので,お誘い合わせの上,ご来場ください.会場受付ではお名刺を頂戴しておりますので,お名刺をご持参くださいませ.
問い合わせ
ブラウザのクッキーを使用可能にして登録ください.社内セキュリティ等の問題で登録作業が行えない場合は,お手数ですが右上の問い合わせフォームより,必要事項をご記入の上,「〇〇セミナー登録希望」とご連絡ください.
登録作業を行うと,返信メールが送られます.1日経っても確認メールが届かない場合は,問い合わせフォームよりご連絡ください.
本ウェブサイト,本セミナーに関する問い合わせも右上の問い合わせフォームよりご連絡ください.