Feb
01
ヒューマノイドロボットのモーション作成 (産業技術短期大学 二井見 博文)
目標(対象者と教育目標)
短期大学1年生(工学の入門)
複数のモータの制御を理解する
人間の動作を見直す
工学への興味を高める
セールスポイント
ヒューマノイド型であり、学生が積極的に取り組める
直接教示ができるため、モーション作成が簡単
概要
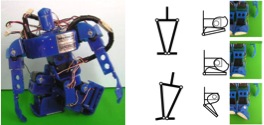
小型ヒューマノイドロボットを使い、起き上がりや歩行などのモーションを作成する実習を行っている
工夫点
膝を深く曲げることができる。(起き上がり時に必要)
足首のみで簡単に左右の重心移動が行える
成果
人の動作を見直し、ロボットを歩行させることができた
工学への興味を高めることができた
特記事項
1年生最初の実験でお互いに初対面であるが、実習を進めるうちに会話がはずみ、打ち解けていった
作成者、連絡先
産業技術短期大学 二井見博文、niimi@cit.sangitan.ac.jp