Jul
03
ホンダにおけるRTミドルウェア開発と標準化活動(株式会社本田技術研究所 関谷 眞)
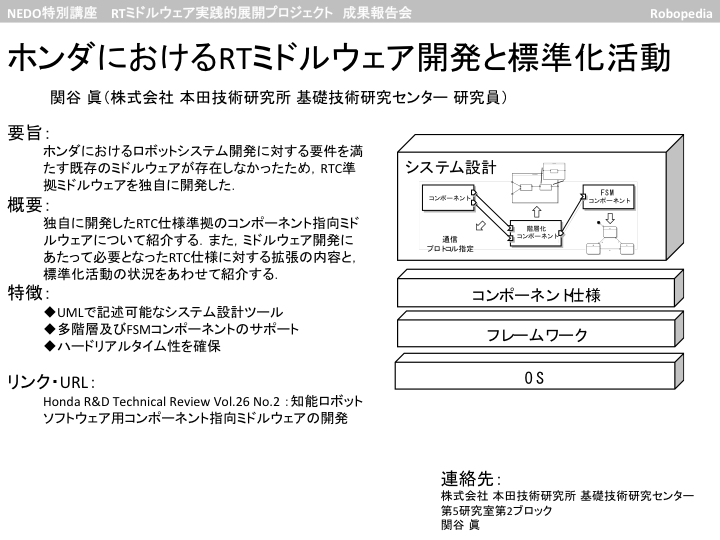
ホンダにおけるロボットシステム開発に対する要件を満たす既存のミドルウェアが存在しなかったため,RTC準拠ミドルウェアを独自に開発した.
独自に開発したRTC仕様準拠のコンポーネント指向ミドルウェアについて紹介する.また,ミドルウェア開発にあたって必要となったRTC仕様に対する拡張の内容と,標準化活動の状況をあわせて紹介する.
アイキャッチ画像
ホンダにおけるロボットシステム開発に対する要件を満たす既存のミドルウェアが存在しなかったため,RTC準拠ミドルウェアを独自に開発した.
独自に開発したRTC仕様準拠のコンポーネント指向ミドルウェアについて紹介する.また,ミドルウェア開発にあたって必要となったRTC仕様に対する拡張の内容と,標準化活動の状況をあわせて紹介する.
