Feb
01
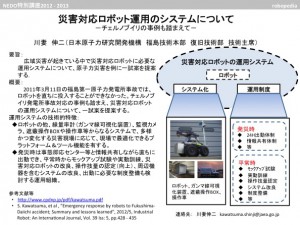
災害対応ロボット運用システムについて -チェルノブイリの事例も踏まえて-(日本原子力研究開発機構 川妻 伸二)

概要
1999年9月30日のJCO臨界事故後に原子力災害ロボットが多数開発されていたが、2011年3月11日の福島第一原子力発電所事故では、直ちに投入することができなかった。その大きな理由のひとつとして、運用組織がなかったことが挙げられている。ドイツやフランスでは既に原子力災
害発生に対応するロボットやその運用組織が整備されており、日本でも、国、電気事業者あるいは産業界等で、原子力防災ロボットやその運用組織について議論が進められつつある。本報告では、広域災害が起きている中での原子力災害に対応するための運用システムのありかたについて、福島第一発電所事故のみならずチェルノブイリ発電所事故対応の事例も踏まえ、より現実的な運用システムを構築するための課題を整理するとともに、運用システムの一試案について報告する。
アイキャッチ画像