Mar
06
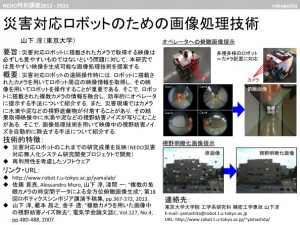
災害対応ロボットのための画像処理技術(東京大学 山下 淳)
【概要】
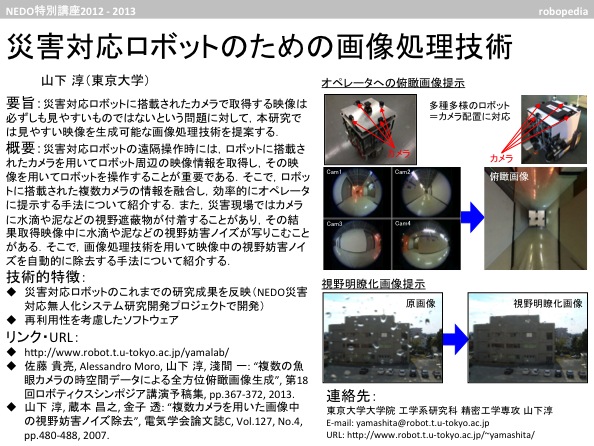
災害対応ロボットの遠隔操作時には,ロボットに搭載されたカメラを用いてロボット周辺の映像情報を取得し,その映像を用いてロボットを操作することが重要である.このとき,オペレータに提示する情報の質を高めると,遠隔操作性の向上により作業の効率化を図ることが可能である.例えばロボットの前後左右すべての周囲の状況を認識するためロボットに複数のカメラを搭載した場合,全カメラの映像を操作者にそのまま単純に提示しただけでは状況が掴みにくい.そこで画像処理技術を用いて,複数のカメラから得られる映像情報を見やすい映像に変換し,効率的にオペレータに提示する手法について紹介する.また,災害現場ではカメラに水滴や泥などの視野遮蔽物が付着することがあり,その結果取得映像中
に水滴や泥などの視野妨害ノイズが写りこむことがある.そこで,画像処理技術を用いて映像中の視野妨害ノイズを自動的に除去する手法について紹介する.
アイキャッチ画像