Nov
19
小型移動ロボットの開発(千葉工業大学 吉田 智章)
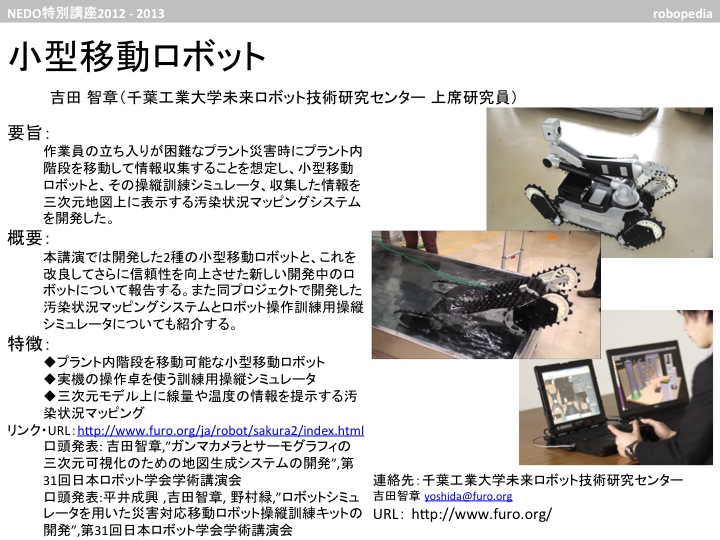
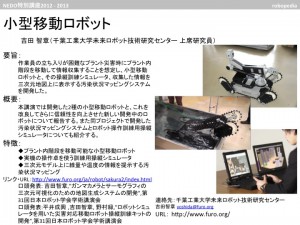
作業員の立ち入りが困難なプラント災害時にプラント内階段を移動して情報収集することを想定し、NEDO災害対応無人化システム研究開発プロジェクトにおいて小型移動ロボットと、その操縦訓練シミュレータ、収集した情報を三次元地図上に表示する汚染状況マッピングシステムを開発した。本講演では開発した小型移動ロボットと、これを改良してさらに信頼性を向上させた新しい開発中のロボットについて報告する。また同プロジェクトで開発した汚染状況マッピングと操縦シミュレータについても紹介する。
アイキャッチ画像