2月27日 災害対応ロボットワークショップ 開催のお知らせ
近年、国内外で発生している自然災害、インフラや産業施設の事故、原子力災害等に対して、災害対応ロボットの活躍が期待されています。
災害対応ロボットを社会で創り育て、定着させるためには、どのような技術や施策、国内外の協力体制の構築等の取り組みが求められるか、その議論を深めるための体系的ワークショップとして
“災害対応ロボットワークショップ(NEDO特別講座)”
を、下記の要領で開催します。
これはNEDO特別講座(ロボット技術経営)の一環として、本年度から来年度にかけて計画しているもので、災害対応ロボットを社会に実装するための研究や技術のみならず、ソリューションや技術経営の観点から取り上げ、紹介するとともに、議論を深めます。本年度まで実施されているNEDOの「災害対応無人化システム研究開発プロジェクト」についても取り上げてまいります。
本案内の最後の部分に今後の計画を記します。
なお、このワークショップの内容は、ロボットソリューションの体系的蓄積を念頭においたロボぺディアにアップロードいたします。本ワークショップへの多数のかたのご参画とともに、のちに後日ワークショップの内容を知っていただく上でも、特に、関連ロボット技術、ロボット教育、そして、ロボット技術経営の観点からも、このロボぺディアもあわせてご活用いただければ幸いです。
災害対応ロボットワークショップ全体像(敬称略)
2/27 水 野波健蔵(千葉大),松野文俊(京大),川妻伸二(JAEA)
3/19 火 山下淳(東大,ロボットビジョン),田中勤(東電,ロボットニーヅ)
7/2 火 田所諭(東北大,災害対応ロボット)
9/3 火 北原成郎(熊谷組,無人化施工)
11/12 火 小柳栄次(千葉工大,移動ロボット)
1/7 火 浦環(東大,水中ロボット)
今回のワークショップ
記
日時:2013年2月27日 15:00-17:30
場所:東京大学本郷キャンパス工学部2号館 2F 221講義室
場所が変更になりました
講演:
①松野文俊氏 災害対応におけるロボットシステムの標準化と国際協力
②野波健蔵氏 完全自律型電動マルチロータヘリコプタ ― ミニサーベイヤーの性能と展望 ―
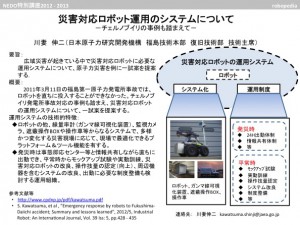
③川妻伸二氏 災害対応ロボット運用システムについて -チェルノブイリの事例も踏まえて-
詳細
①松野文俊氏 災害対応におけるロボットシステムの標準化と国際協力
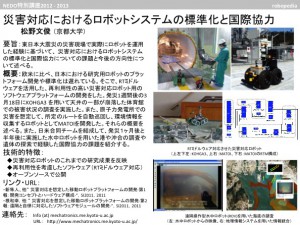
【概要】
阪神淡路大震災以降、大都市直下型の大地震や地下街などでのNBC災害などを想定して災害対応ロボットシステムの研究開発がなされてきた。しかし、今回の東日本大震災では、地震動による直接的な被害だけでなく、津波さらには福島第一原子力発電所の事故といった、様々な災害が複雑に絡み合った複合災害により、広い地域に大きな被害がもたらされた。講演者のグループは、発災1週間後の3月18日に陸上ロボットを用いて天井の一部が崩落した体育館での被害状況の調査を実施した。また、日米合同チームを結成して、発災1ヶ月後の4月19日から水中ロボットを用いた港の瓦礫の状況の調査とご遺体の探索を海上保安庁と合同で実施した。さらに、半年後の10月22日からは被災地の漁協の依頼で、沖の魚場の調査を水中ロボットを用いて実施した。本講演では、東日本大震災の災害現場で実際にロボットを運用した経験に基づいて、災害対応におけるロボットシステムの標準化と国際協力についての課題と今後の方向性について述べる。
②野波健蔵氏 完全自律型電動マルチロータヘリコプタ ― ミニサーベイヤーの性能と展望 ―

【概要】
近年,電動型マルチロータヘリコプタの研究開発やベンチャー企業によるビジネス展開が活発に行われている.この背景にはシングルロータヘリのメカニズムの複雑さに対して,マルチロータヘリはモータの回転数制御のみで飛行が可能なこと,さらに,小型の高出力モータや超小型軽量センサ,高性能プロセッサーが開発されマルチロータヘリの実用化に大きな貢献をしていることがある.こうした飛行ロボットは災害時の情報収集,犯罪捜査・救助・交通監視・コンビナート等の警備レスキュー活動,遺跡調査・植生生育・海洋汚染・火口付近などの科学的観測,トンネルや橋梁・ダム・高層ビル・送電線等の大型構造物点検,映画ロケやニュース報道等の空撮等多くの応用があり,今後広く普及することが期待されている.著者らも東日本大震災の巨大津波で被災した地域の被害状況を空撮調査した.さらに,昨年10月には約50機関からなる産学官のミニサーベイヤーコンソーシアムを設立してオールジャパン体制で早期の実用化を目指している.講演では著者らが開発した電動型マルチロータヘリコプタのミニサーベイヤーの技術や性能について詳細に紹介し,今後を展望する.
③川妻伸二氏 災害対応ロボット運用システムについて -チェルノブイリの事例も踏まえて-
 【概要】
【概要】
1999年9月30日のJCO臨界事故後に原子力災害ロボットが多数開発されていたが、2011年3月11日の福島第一原子力発電所事故では、直ちに投入することができなかった。その大きな理由のひとつとして、運用組織がなかったことが挙げられている。ドイツやフランスでは既に原子力災害発生に対応するロボットやその運用組織が整備されており、日本でも、国、電気事業者あるいは産業界等で、原子力防災ロボットやその運用組織について議論が進められつつある。
本報告では、広域災害が起きている中での原子力災害に対応するための運用システムのありかたについて、福島第一発電所事故のみならずチェルノブイリ発電所事故対応の事例も踏まえ、より現実的な運用システムを構築するための課題を整理するとともに、運用システムの一試案について報告する。
―本件に関する連絡先―――――――――――――――――――――――――
東京大学 佐藤知正 (tomomasasato@nifty.com)
写真集





