Jun
22
災害対応無人化システム研究開発プロジェクト「ガンマカメラの開発」(株式会社日立製作所 上野 雄一郎)
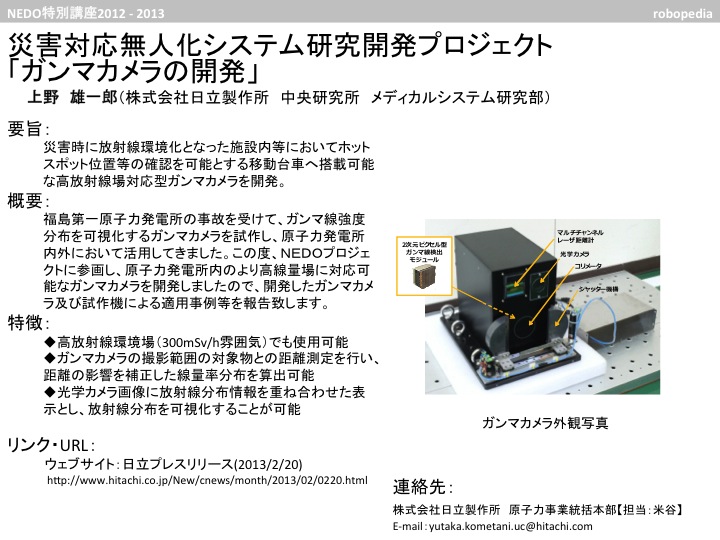 福島第一原子力発電所の事故を受けて、ガンマ線強度分布を可視化するガンマカメラを試作し、原子力発電所内外において活用してきました。この度、NEDOプロジェクトに参画し、原子力発電所内のより高線量場に対応可能なガンマカメラを開発しましたので、開発したガンマカメラ及び試作機による適用事例等を報告致します。
福島第一原子力発電所の事故を受けて、ガンマ線強度分布を可視化するガンマカメラを試作し、原子力発電所内外において活用してきました。この度、NEDOプロジェクトに参画し、原子力発電所内のより高線量場に対応可能なガンマカメラを開発しましたので、開発したガンマカメラ及び試作機による適用事例等を報告致します。
アイキャッチ画像

福島第一原子力発電所の事故を受けて、ガンマ線強度分布を可視化するガンマカメラを試作し、原子力発電所内外において活用してきました。この度、NEDOプロジェクトに参画し、原子力発電所内のより高線量場に対応可能なガンマカメラを開発しましたので、開発したガンマカメラ及び試作機による適用事例等を報告致します。

