Feb
01
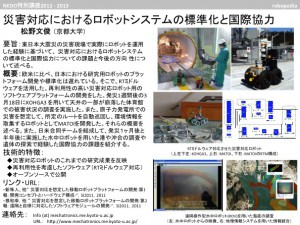
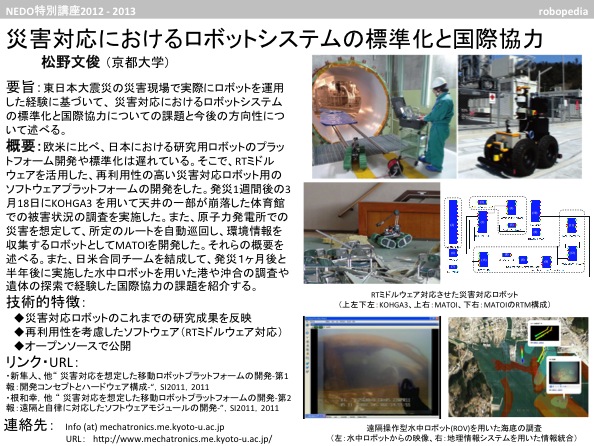
災害対応におけるロボットシステムの標準化と国際協力(京都大学 松野文俊)
概要
阪神淡路大震災以降、大都市直下型の大地震や地下街などでのNBC災害などを想定して災害対応ロボットシステムの研究開発がなされてきた。しかし、今回の東日本大震災では、地震動による直接的な被害だけでなく、津波さらには福島第一原子力発電所の事故といった、様々な災害が複雑に絡み合った複合災害により、広い地域に大きな被害がもたらされた。講演者のグループは、発災1週間後の3月18日に陸上ロボットを用いて天井の一部が崩落した体育館での被害状況の調査を実施した。また、日米合同チームを結成して、発災1ヶ月後の4月19日から水中ロボットを用いた港の瓦礫の状況の調査とご遺体の探索を海上保安庁と合同で実施した。さらに、半年後の10月22日からは被災地の漁協の依頼で、沖の魚場の調査を水中ロボットを用いて実施した。本講演では、東日本大震災の災害現場で実際にロボットを運用した経験に基づいて、災害対応におけるロボットシステムの標準化と国際協力についての課題と今後の方向性について述べる。
アイキャッチ画像