Oct
30
ロボットシステム開発におけるRTMの有用性および開発ツール群(産業技術総合研究所 原 功)
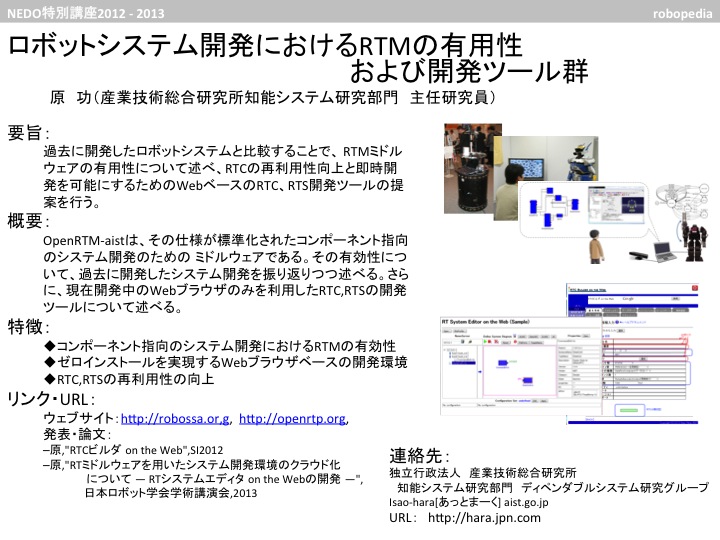
これまで開発してきた事情通ロボット、HRP2の対話システム等のソフトウェアシステムを振り返り、コンポーネント指向のロボットシステムにおける有用性と問題点について述べ、RTミドルウェアを用いた場合にどの程度の問題点が解決可能か、継続的なシステム開発において何が重要かということについて述べる。また、OpenRTM-aistを用いたコンポーネント開発、システム開発において利用可能な開発ツールであるEclipse版とWeb版のRTコンポーネントエディタとRTシステムエディタを紹介し、その違いについて述べる。
アイキャッチ画像