May
25
RTコンポーネントの再利用によるロボットシステム開発(名城大学 大原 賢一)
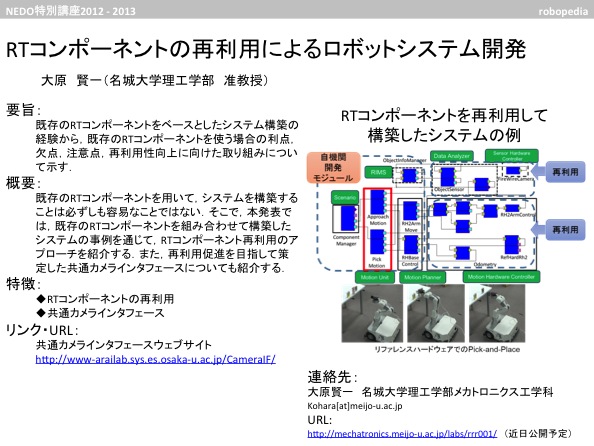 RTミドルウェアをベースとしたシステム開発において、効率のよいシステム開発を行っていくためには、既存のRTコンポーネントの有効利用が重要である。これまで、多くのRTコンポーネントが開発され、これらのコンポーネントは開発者WebページやOpenRTM-aistのホームページからダウンロードが可能である。しかしながら、RTコンポーネントごとの設計思想の違いなどから、所望のコンポーネント同士のみで、容易にシステムを構築していくことは困難である。そこで、本発表では、既存のRTコンポーネントを用いたロボットシステムの事例を通じて、RTコンポーネントの再利用に向けたアプローチを紹介する。
RTミドルウェアをベースとしたシステム開発において、効率のよいシステム開発を行っていくためには、既存のRTコンポーネントの有効利用が重要である。これまで、多くのRTコンポーネントが開発され、これらのコンポーネントは開発者WebページやOpenRTM-aistのホームページからダウンロードが可能である。しかしながら、RTコンポーネントごとの設計思想の違いなどから、所望のコンポーネント同士のみで、容易にシステムを構築していくことは困難である。そこで、本発表では、既存のRTコンポーネントを用いたロボットシステムの事例を通じて、RTコンポーネントの再利用に向けたアプローチを紹介する。
また、開発したRTコンポーネント資産の蓄積を目的として策定したカメラ・画像処理コンポーネント向けの共通インタフェースについても紹介する。
・ブラウザにGoogleアカウントを設定すると,ブラウザ上で発表資料がご覧頂けます.
発表資料(PDF)ダウンロード
アイキャッチ画像