Aug
30
RTM・ROSの相互運用技術(東京大学 岡田 慧)
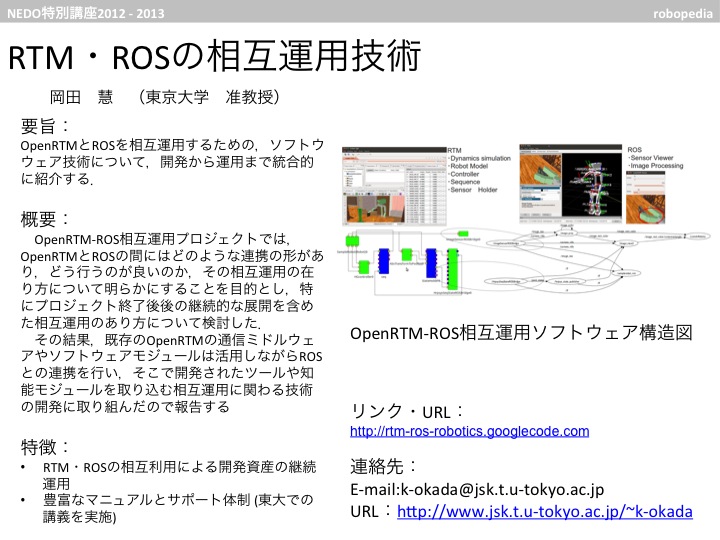
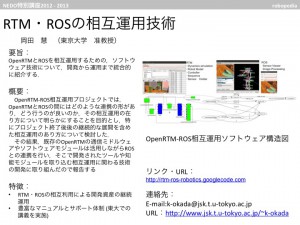
本講演では,NEDO知能化プロジェクトでは技術開発をすすめてきたOpenRTMミドルウェアを基盤としたシステムと,海外で急速にユーザを増やしてきているROSを中心としたロボットシステムの間にはどのような連携の形があり,どう行うのが良いのか,その相互運用の在り方について,既存のOpenRTMの通信ミドルウェアやソフトウェアモジュールは活用しながらROSとの連携を行い,そこで開発されたツールや知能モジュールを取り込むOpenRTM-ROS相互運用ソフトウェアについて,実例やサンプルプログラムを交えて紹介する.
アイキャッチ画像