Jul
07
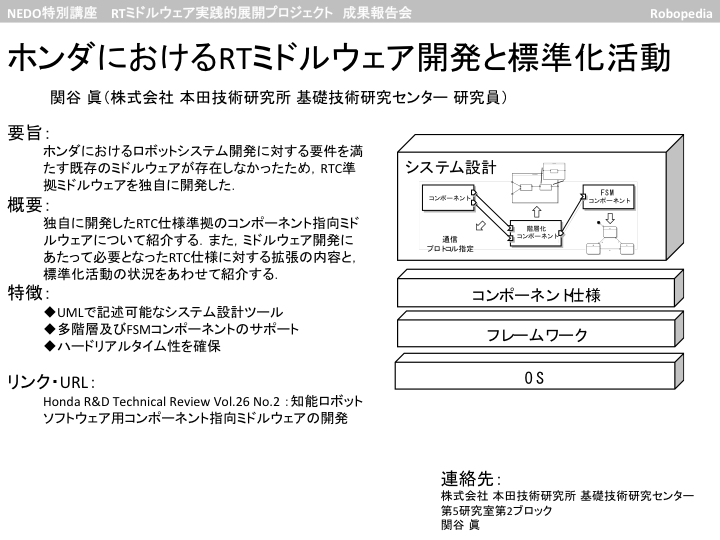
ホンダにおけるロボットシステム開発に対する要件を満たす既存のミドルウェアが存在しなかったため,RTC準拠ミドルウェアを独自に開発した.
独自に開発したRTC仕様準拠のコンポーネント指向ミドルウェアについて紹介する.また,ミドルウェア開発にあたって必要となったRTC仕様に対する拡張の内容と,標準化活動の状況をあわせて紹介する.
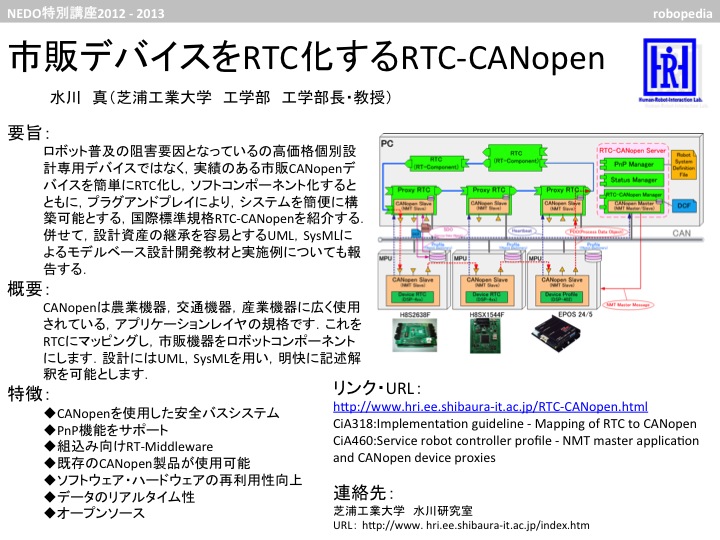
ロボット普及の阻害要因となっているの高価格個別設計専用デバイスではなく,実績のある市販CANopenデバイスを簡単にRTC化し,ソフトコンポーネント化するとともに,プラグアンドプレイにより,システムを簡便に構築可能とする,国際標準規格RTC-CANopenを紹介する.併せて,設計資産の継承を容易とするUML,SysMLによるモデルベース設計開発教材と実施例についても報告する.
発表資料(PDF)ダウンロード