Dec
12
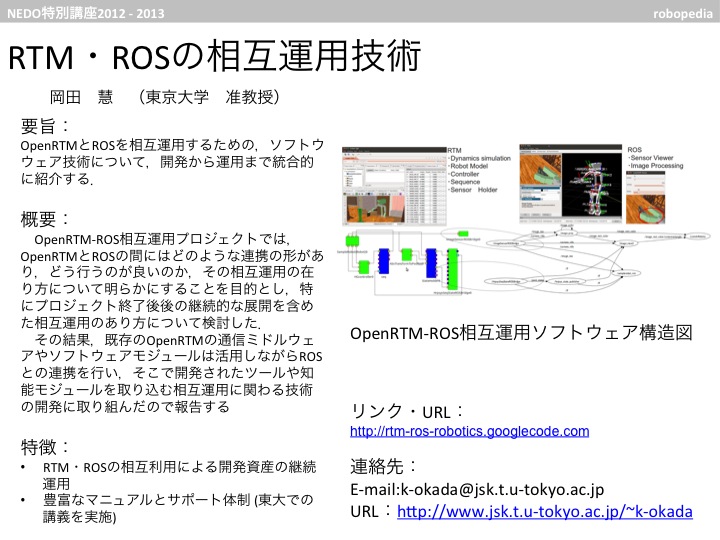
本講演では,NEDO知能化プロジェクトでは技術開発をすすめてきたOpenRTMミドルウェアを基盤としたシステムと,海外で急速にユーザを増やしてきているROSを中心としたロボットシステムの間にはどのような連携の形があり,どう行うのが良いのか,その相互運用の在り方について,既存のOpenRTMの通信ミドルウェアやソフトウェアモジュールは活用しながらROSとの連携を行い,そこで開発されたツールや知能モジュールを取り込むOpenRTM-ROS相互運用ソフトウェアについて,実例やサンプルプログラムを交えて紹介する.
文部科学省・大学発新産業創出拠点プロジェクトでは,ポテンシャルは高いがリスクも高い大学等の研究拠点におけるシーズ技術に関して,事事業化ノウハウを持った人材(「事業プロモータ」)ユニットを活用し,事業戦略・知財戦略・市場・出口を見据え,ベンチャーの創業を目指した研究開発を実施することを目的として平成24年度から始まった事業です.
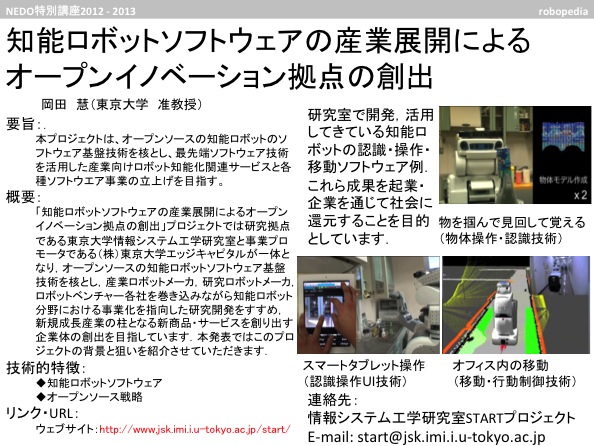
「知能ロボットソフトウェアの産業展開によるオープンイノベーション拠点の創出」プロジェクトでは研究拠点である東京大学情報システム工学研究室事業プロモータである(株)東京大学エッジキャピタルが一体となり,オープンソースの知能ロボットのソフトウェア基盤技術を核とし,産業ロボットメーカ,研究ロボットメーカ,ロボットベンチャー各社を巻き込みながらロボット分野における事業化に向けた開発をすすめ,世界を驚かせるような新商品・サービスを創り出す企業体を創出することで,日本のロボット分野における国際的競争力の向上に質することを目的としています.本講演ではこのプロジェクトの概要を紹介させていただきます.