Mar
06
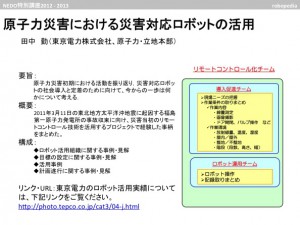
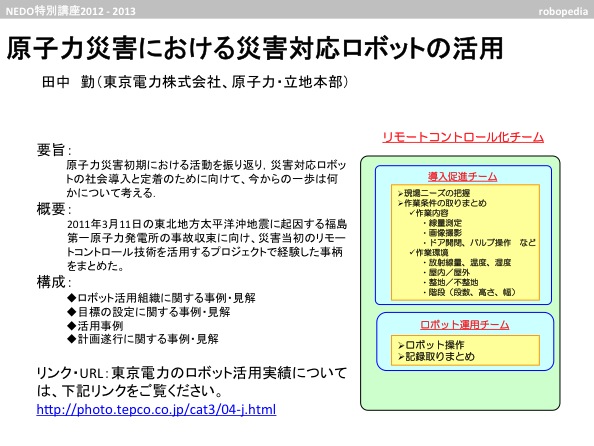
原子力災害における災害対応ロボットの活用(東京電力 田中 勤)
【概要】
原子力災害の初期段階でロボットの活用検討チームの一員であった経験から、災害対応ロボットの活用に参考となる見解を導く。「災害対応ロボットの社会導入と定着のために向けて、今からの一歩は何か」というゴールを設定し、組織、目的、活用事例、計画遂行の4項目について検討を加える。項目の都度、論点を列記する形態とした。
項目1は、ロボットは人が動かしているという観点から、ロボット活用組織に関する事例とし、活躍したチームに触れる。
項目2は、当時のリモートコントロール技術導入目標を紹介し、目標設定の手法や重要性の議論をする。
項目3は、活用事例の紹介である。リモートコントロール技術の全般説明をし、屋内外で活躍した装置を、組合せとして紹介する。
項目4は、計画遂行のため、災害対応ロボットに期待する点についてまとめた。
アイキャッチ画像