Aug
29
計測・作業要素技術の開発ー水陸両用移動装置(株式会社東芝 小舞 正文)
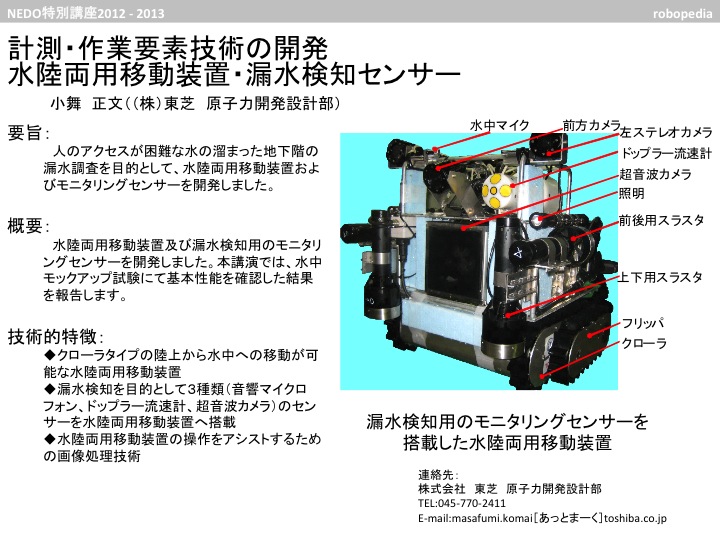
アクセスに困難を伴うような汚濁水が溜まった地下階の調査を想定し、NEDO災害対応無人化システム研究開発プロジェクトにおいて、漏水箇所把握のためのモニタリングデバイスと、そのモニタリングデバイスを搭載することが可能な水陸両用の遠隔移動装置を開発した。また遠隔移動装置の操作を視覚的にサポートする画像処理ソフトウェアを開発した。ここでは、漏水箇所把握のためのモニタリングデバイスとして開発した、音響マイクロフォン、ドップラー流速計および超音波カメラから成る計測システムと本システムを水陸両用移動装置に搭載した組合せ水中試験について紹介する。
アイキャッチ画像