Dec
26
水に関わるロボット四題(九州工業大学 浦 環)
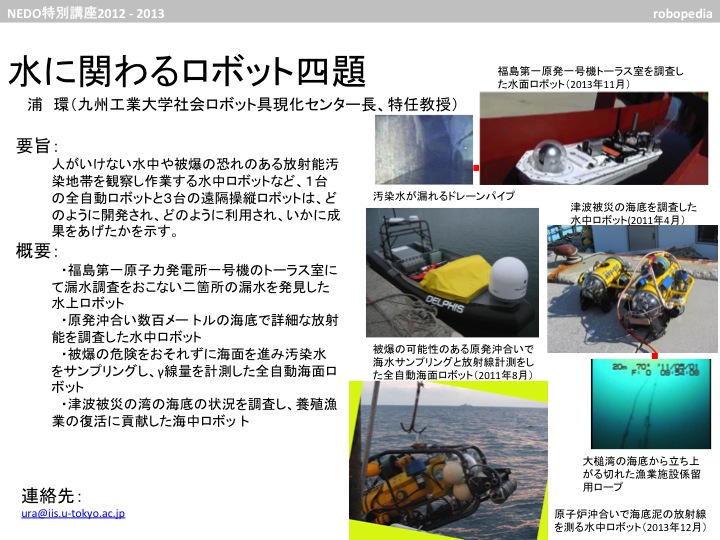 福島第一原発一号機トーラス室調査のための水上ロボット、原発沖合い数百メー トルの海底を調査する水中ロボット、被爆の危険をおそれずに海面を進み汚染水 をサンプリングする海面ロボット、そして津波被災の湾内を調査した海中ロボッ ト。1台の全自動ロボットと3台の遠隔操縦ロボットはどのように企画され、ど のように使われ、どのように成果を挙げたかを紹介します。
福島第一原発一号機トーラス室調査のための水上ロボット、原発沖合い数百メー トルの海底を調査する水中ロボット、被爆の危険をおそれずに海面を進み汚染水 をサンプリングする海面ロボット、そして津波被災の湾内を調査した海中ロボッ ト。1台の全自動ロボットと3台の遠隔操縦ロボットはどのように企画され、ど のように使われ、どのように成果を挙げたかを紹介します。
アイキャッチ画像

福島第一原発一号機トーラス室調査のための水上ロボット、原発沖合い数百メー トルの海底を調査する水中ロボット、被爆の危険をおそれずに海面を進み汚染水 をサンプリングする海面ロボット、そして津波被災の湾内を調査した海中ロボッ ト。1台の全自動ロボットと3台の遠隔操縦ロボットはどのように企画され、ど のように使われ、どのように成果を挙げたかを紹介します。