Oct
30
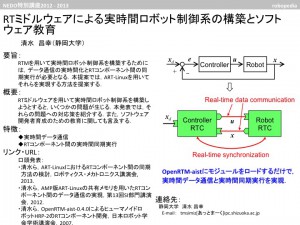
RTミドルウェアによる実時間ロボット制御系の構築とソフトウェア教育(静岡大学 清水 昌幸)
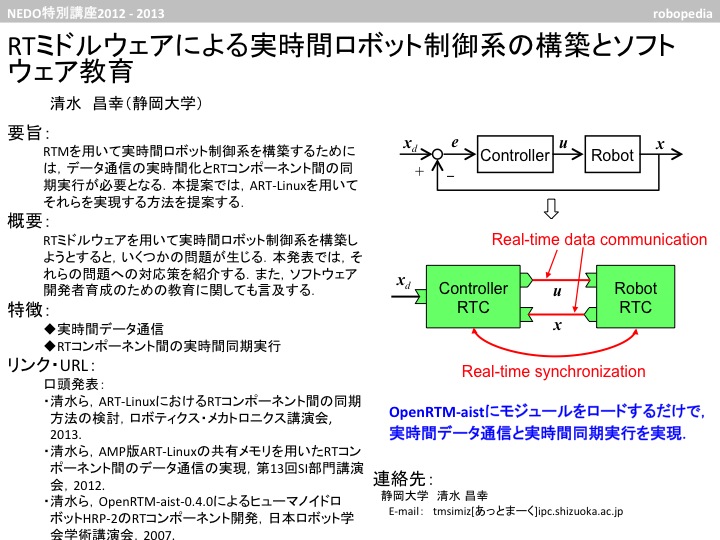
RTミドルウェアはロボットのためのソフトウェアプラットフォームであるが,実際にロボットの実時間制御系をRTミドルウェアで構築しようとすると,いくつかの困難に遭遇する.本講演では,ロボットの実時間制御を実現するために筆者がこれまでに行ってきた取り組みを紹介する.また,RTミドルウェア普及のためには,ユーザの取り込みだけでなく開発者の育成も重要である.本講演では,RTミドルウェアを含めたソフトウェア
教育に関する筆者のこれまでの経験と取り組みについても紹介する.
アイキャッチ画像