Jun
22
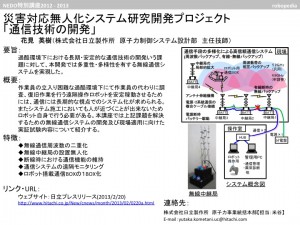
災害対応無人化システム研究開発プロジェクト「通信技術の開発」(株式会社日立製作所 花見 英樹)
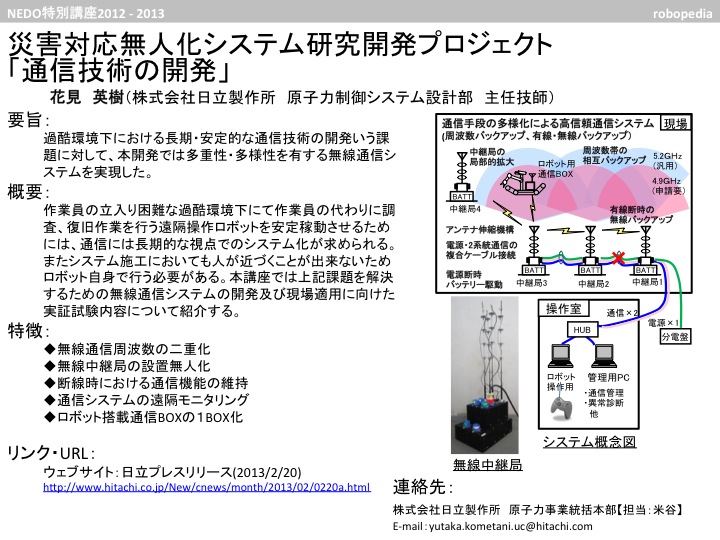 災害対応無人化システムにて開発される遠隔操作型移動装置が、長期的・安定的に制御・操作可能となるよう、多重性・多様性を有する無線通信システムを開発した。
災害対応無人化システムにて開発される遠隔操作型移動装置が、長期的・安定的に制御・操作可能となるよう、多重性・多様性を有する無線通信システムを開発した。
①無線LAN規格に適合する周波数から異なる2種類の周波数(5.2GHz、4.9GHz)で相互バックアップ可能な通信システム。
②無線通信中継局の運搬・設置・ケーブル接続を無人にて行い、電源供給、通信信号の安定的供給を可能とする。
③無線通信中継局間のケーブル断線が生じた場合でも無線でバックアップする有線/無線ハイブリッド方式。またバッテリーにより通信環境を維持可能とする。
④無線通信中継局の故障、中継局間のケーブル断線等の故障事象を管理用コンピュータにてモニタリング可能とする。
⑤ロボット搭載通信機器を1BOX化
アイキャッチ画像