Aug
29
遠隔操作ヒューマンインタフェース(株式会社東芝 小川 秀樹)
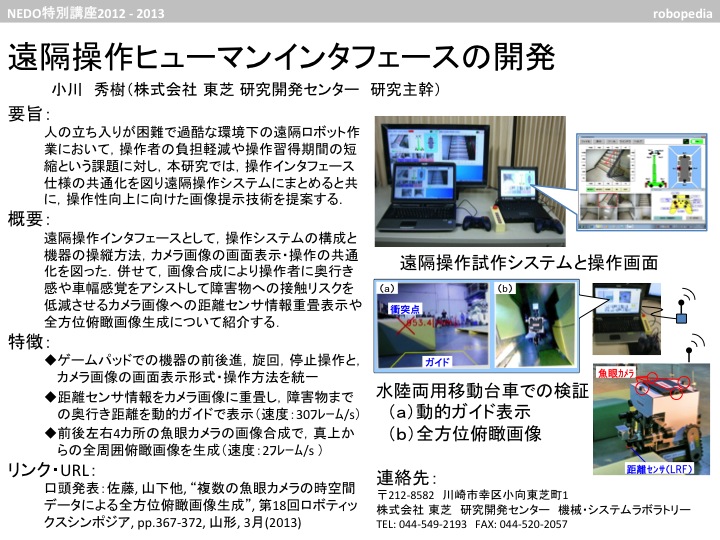 災害現場において、特に作業員の立ち入りが困難な過酷な環境下にある設備内で活用が期待されるロボットの重要な共通要素技術の1つに、遠隔操作ヒューマンインタフェース技術があげられる。NEDO災害対応無人化システム研究開発プロジェクトにおいても、操作者の負担軽減や操作習得期間の短縮を目的に開発に取り組んだ。ここでは、本プロジェクトに参画したコンソーシアム各社の遠隔機器、ロボットの操作インタフェース仕様の共通化案をまとめ、それを反映した開発成果を紹介する。併せて、遠隔による操作性向上に向け、カメラ画像を基に距離センサ情報重畳表示や全方位俯瞰画像生成など開発した画像提示技術についても紹介する。
災害現場において、特に作業員の立ち入りが困難な過酷な環境下にある設備内で活用が期待されるロボットの重要な共通要素技術の1つに、遠隔操作ヒューマンインタフェース技術があげられる。NEDO災害対応無人化システム研究開発プロジェクトにおいても、操作者の負担軽減や操作習得期間の短縮を目的に開発に取り組んだ。ここでは、本プロジェクトに参画したコンソーシアム各社の遠隔機器、ロボットの操作インタフェース仕様の共通化案をまとめ、それを反映した開発成果を紹介する。併せて、遠隔による操作性向上に向け、カメラ画像を基に距離センサ情報重畳表示や全方位俯瞰画像生成など開発した画像提示技術についても紹介する。
アイキャッチ画像