Apr
01
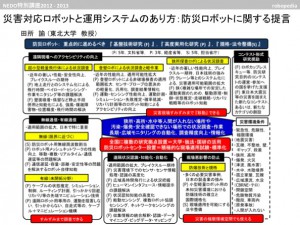
災害対応ロボットと運用システムのあり方:防災ロボットに関する提言(東北大学 田所 諭)
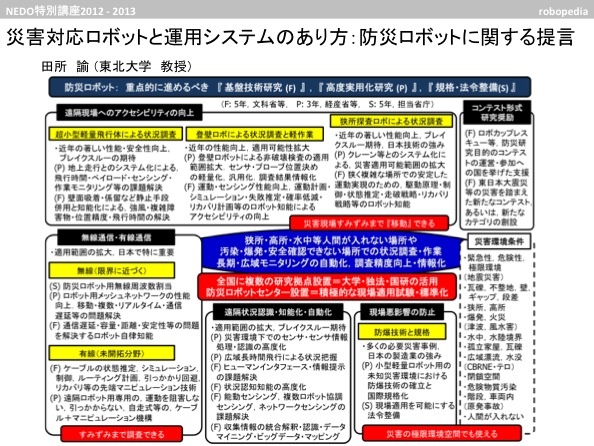 災害予防・緊急対応・復旧・復興と変化する災害の各フェーズにおいて、防災ロボットには、人間が入れない場所や危険性の高い場所で、人間に代わって遠隔的・自動的に状況調査や作業を行うことが求められている。それによって我が国の災害リスクを低下させることは、産業競争力の維持発展のために不可欠な要件である。本プロジェクトでは、それに必要な重点課題を検討した。
災害予防・緊急対応・復旧・復興と変化する災害の各フェーズにおいて、防災ロボットには、人間が入れない場所や危険性の高い場所で、人間に代わって遠隔的・自動的に状況調査や作業を行うことが求められている。それによって我が国の災害リスクを低下させることは、産業競争力の維持発展のために不可欠な要件である。本プロジェクトでは、それに必要な重点課題を検討した。
その結果を要約すると、重点的に研究開発を進めるべき技術として、下記が重要である。
・遠隔現場へのアクセシビリティ向上(特に、超小型軽量飛行体、登壁ロボ、狭所探査ロボ)
・ロボットによる現場悪影響の防止(特に、防爆技術・規格)
・無線通信・有線通信の問題点解決
・遠隔状況認識・知能化・自動化
・コンテスト形式による基盤技術研究の奨励
さらには、重点的に進めるべき規格標準化や、重点的に整備すべき組織・制度として、下記が重要である。
・ロボットの性能評価法の国際標準化
・部品の可換性のための国際標準化
・国際安全規格の整備
・全国に複数の研究開発拠点の整備
・防災ロボットセンターの開設
・ブラウザにgoogleアカウントを設定すると,ブラウザ上で発表資料をご覧頂けます.
発表資料(PDF)ダウンロード
アイキャッチ画像