Jan
07
RTミドルウェアの普及に向けて(産業技術総合研究所 金広 文男)
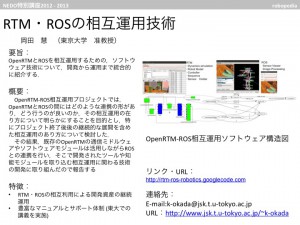
 RTミドルウェア(RTM)とはRTコンポーネント(RTC)と呼ぶロボットの機能要素のソフトウェアモジュールを組み合わせてロボットシステムを構築するためのソフトウェアプラットフォームである。これまでに複数のプロジェクトでRTM自体の開発、RTCの開発、RTM/RTCを用いたアプリケーションの開発が行われてきた。しかし、開発開始から10年を経た今でも十分に普及したとは言えない状況にある。そこで本講演ではこれまでの取り組みを振り返り、利用状況や潜在ユーザの意見から現状を分析し、今後取るべき方策について考察を行う。
RTミドルウェア(RTM)とはRTコンポーネント(RTC)と呼ぶロボットの機能要素のソフトウェアモジュールを組み合わせてロボットシステムを構築するためのソフトウェアプラットフォームである。これまでに複数のプロジェクトでRTM自体の開発、RTCの開発、RTM/RTCを用いたアプリケーションの開発が行われてきた。しかし、開発開始から10年を経た今でも十分に普及したとは言えない状況にある。そこで本講演ではこれまでの取り組みを振り返り、利用状況や潜在ユーザの意見から現状を分析し、今後取るべき方策について考察を行う。
アイキャッチ画像