Robopedia
ロボペディアは、ロボットに関する研究開発や教育事例を収集し、共有するためのポータルサイトです。
RSS Feed
トップページ
ニュース
ソリューション
サービスロボット
介護・福祉
フィールドロボット
探索
瓦礫撤去
運用システム
ロボットインフラ
RTミドルウエア
その他基盤ソフトウエア
産業用ロボット
マニピュレータ
計測・検出
ロボット教育
事例紹介
教材開発
教育研究
教育手法
技術経営
政府・地方自治体の施策
法律・保険
ベンチャー企業
地域活動調査・研究
シーズ技術
要素技術
アクチュエータ
基盤技術・ロボットインフラ
ソフトウエア
規格・標準化
安心・安全
移動する
移動・マッピング
飛行
水中
見る・測る・量る
センシング
コンピュータビジョン
セミナー・ワークショップ
RTM・RTCセミナー
産業競争力懇談会セミナー
フィールドロボットセミナー
地域共創セミナー
地域コミュニティ共創活動セミナー
社会実装コンテスト
RT起業セミナー
旧ロボペディア
お問い合わせ
索引
記事一覧
著者一覧
Robopedia
»
コンテンツ
»
シーズ技術
»
見る・測る・量る
»
カテゴリー 「見る・測る・量る」
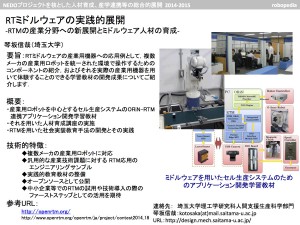
RTミドルウェアの実践的展開(埼玉大学 琴坂 信哉)
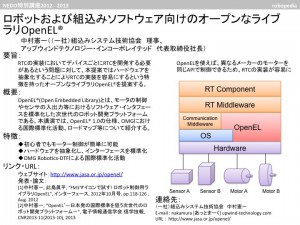
ロボットおよび組込みソフトウェア向けのオープンなライブラリOpenEL(組込みシステム技術協会 理事、アップウィンドテクノロジー・インコーポレイテッド 代表取締役社長 中村 憲一)
災害対応無人化システムの取り組み(新エネルギー・産業技術総合開発機構(NEDO) 川島 正)
インターネットを活用したロボットサービスと関連技術とRSiの取り組み(産業技術大学院大学 成田 雅彦)
インターネットを活用したロボットサービスと関連技術とRSiの取り組み(産業技術大学院大学 成田 雅彦)
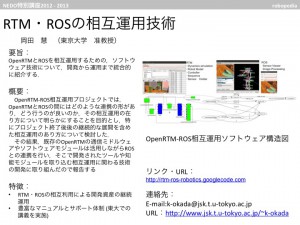
RTM・ROSの相互運用技術(東京大学 岡田 慧)
DAQ-Middlewareについて(高エネルギー加速器研究機構 千代 浩司)
災害対応無人化システム研究開発プロジェクト「ガンマカメラの開発」(株式会社日立製作所 上野 雄一郎)
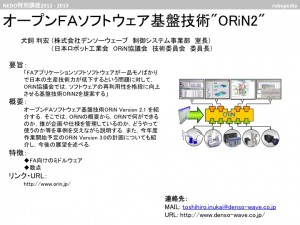
オープンFAソフトウェア基盤技術“ORiN2”(デンソーウェーブ 犬飼 利宏)
「見る・測る・量る」の子カテゴリのリスト
コンピュータビジョン
センシング
Page 1 of 2
1
2
ランダムピックアップ
7月7日 NEDO特別講座シンポジウム(ロボット革命の目指すものとRTミドルウェアによる地方からの実現)
ロボット・メカトロニクス講義ノートの公開 (東北学院大学工学部機械知能工学科 熊谷正朗)
ロボット・メカトロニクス講義ノートの公開 (東北学院大学工学部機械知能工学科 熊谷正朗)
災害対応用高所作業ロボット”Super Giraffe”(三菱重工業株式会社 藤田 淳)
検索:
アクセシビリティ
小
標準
大
特大
イベントカレンダー
« Previous events
Next events »
7月 2022
M
T
W
T
F
S
S
27
28
29
30
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
最近の投稿
ロボットの社会実装に向けてのベンチマーキングを検討するワークショップ
平成26〜27年度 NEDOプロジェクトを核とした人材育成、産学連携等の総合的展開/RTミドルウェアの実践的展開(東京大学 佐藤 知正)
「NEDO特別講座シンポジウム~ロボット革命目指すもとRTミドルウェアによる地方からの実現~」の趣旨説明(新エネルギー・産業技術総合開発機構(NEDO) 坂本 健一)
東京都におけるロボット革命(東京都産業技術研究センター 坂下 和広)
ホンダにおけるRTミドルウェア開発と標準化活動(株式会社本田技術研究所 関谷 眞)
投稿カテゴリ
カテゴリーを選択
Uncategorized (1)
コンテンツ (132)
その他 (1)
シーズ技術 (55)
基盤技術・ロボットインフラ (44)
ソフトウエア (32)
安心・安全 (8)
規格・標準化 (27)
通信 (17)
遠隔操作 (6)
移動する (15)
水中 (3)
移動・マッピング (9)
飛行 (2)
要素技術 (2)
アクチュエータ (2)
見る・測る・量る (14)
コンピュータビジョン (8)
センシング (11)
ソリューション (132)
サービスロボット (25)
介護・福祉 (17)
住宅へのRT応用 (8)
フィールドロボット (31)
探索 (22)
瓦礫撤去 (14)
運用システム (21)
ロボットインフラ (38)
RTミドルウエア (34)
その他基盤ソフトウエア (14)
ロボット教育 (40)
事例紹介 (29)
教材開発 (8)
教育手法 (17)
教育研究 (15)
技術経営 (46)
ベンチャー企業 (19)
地域活動調査・研究 (26)
政府・地方自治体の施策 (20)
法律・保険 (4)
産業用ロボット (12)
マニピュレータ (8)
計測・検出 (5)
旧ロボペディア (17)
セミナー・ワークショップ (23)
NEDO特別講座シンポジウム (1)
RTM・RTCセミナー (5)
RT起業セミナー (1)
フィールドロボットセミナー (6)
ロボットの社会実装 (1)
地域共創セミナー (7)
地域コミュニティ共創活動調査報告会 (3)
社会実装コンテスト (3)
産業競争力懇談会セミナー (2)
ニュース (23)
リンク
旧ロボペディアサイト
新エネルギー・産業技術総合開発機構(NEDO)
介護ロボットポータル
RTミドルウエア公式ウェブサイト
Twitter
@robopedia_japanさんのツイート
Go back to top
Powered by
WP exec PHP
.