11月12日 RTM・RTCセミナー開催のお知らせ
NEDO特別講座(ロボット技術経営)では、ロボット産業の活性化、競争力強化を図るため、「国富を担うロボット共通基盤を構築するための人材の育成、交流、研究の活性化」を目指して、「次世代ロボット知能化技術開発プロジェクト」 で研究開発されたRTミドルウェアやその上で機能するRTコンポーネントの規格化、標準化、オープンソース化、汎用モジュール化、資格制度化、産業基盤化等を通じた普及と社会定着に取り組んでいます。
本取り組みの一環として、これらの分野をカバーする第一人者の方々をお招きして体系的なセミナーを開催し、ソフトウェアインフラの技術経営に関する議論を深めることとなりました。
このセミナーで利用されるパワーポイントは、ロボットソリューションの体系的蓄積を念頭においたサイト、ロボペディアに集積していきます。
http://robopedia.sakura.tv
本セミナーへの多数の方々のご参画とともに、後日セミナーの内容を知っていただき、特に、関連ロボット技術、ロボット教育、そして、ロボット技術経営の観点からも、このロボペディアもあわせてご活用いただければ幸いです。
主催
独立行政法人新エネルギー・産業技術総合開発機構(NEDO)、国立大学法人東京大学
日時
2013年11月12日 13:00〜14:30(開催の都合により時間に変更があります)
場所
東京大学本郷キャンパス工学部2号館3階31A会議室
ご講演
① ロボットシステム開発におけるRTMの有用性および開発ツール群:産業技術総合研究所 原 功
② RTミドルウェアによる実時間ロボット制御系の構築とソフトウェア教育:静岡大学 清水 昌幸
詳細
① ロボットシステム開発におけるRTMの有用性および開発ツール群 産業技術総合研究所 原 功
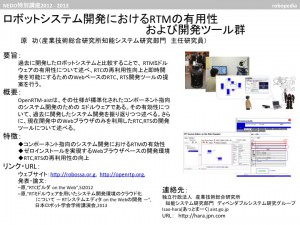 これまで開発してきた事情通ロボット、HRP2の対話システム等のソフトウェアシステムを振り返り、コンポーネント指向のロボットシステムにおける有用性と問題点について述べ、RTミドルウェアを用いた場合にどの程度の問題点が解決可能か、継続的なシステム開発において何が重要かということについて述べる。また、OpenRTM-aistを用いたコンポーネント開発、システム開発において利用可能な開発ツールであるEclipse版とWeb版のRTコンポーネントエディタとRTシステムエディタを紹介し、その違いについて述べる。
これまで開発してきた事情通ロボット、HRP2の対話システム等のソフトウェアシステムを振り返り、コンポーネント指向のロボットシステムにおける有用性と問題点について述べ、RTミドルウェアを用いた場合にどの程度の問題点が解決可能か、継続的なシステム開発において何が重要かということについて述べる。また、OpenRTM-aistを用いたコンポーネント開発、システム開発において利用可能な開発ツールであるEclipse版とWeb版のRTコンポーネントエディタとRTシステムエディタを紹介し、その違いについて述べる。
② RTミドルウェアによる実時間ロボット制御系の構築とソフトウェア教育:静岡大学 清水 昌幸
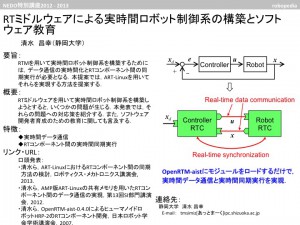 RTミドルウェアはロボットのためのソフトウェアプラットフォームであるが,実際にロボットの実時間制御系をRTミドルウェアで構築しようとすると,いくつかの困難に遭遇する.本講演では,ロボットの実時間制御を実現するために筆者がこれまでに行ってきた取り組みを紹介する.また,RTミドルウェア普及のためには,ユーザの取り込みだけでなく開発者の育成も重要である.本講演では,RTミドルウェアを含めたソフトウェア教育に関する筆者のこれまでの経験と取り組みについても紹介する.
RTミドルウェアはロボットのためのソフトウェアプラットフォームであるが,実際にロボットの実時間制御系をRTミドルウェアで構築しようとすると,いくつかの困難に遭遇する.本講演では,ロボットの実時間制御を実現するために筆者がこれまでに行ってきた取り組みを紹介する.また,RTミドルウェア普及のためには,ユーザの取り込みだけでなく開発者の育成も重要である.本講演では,RTミドルウェアを含めたソフトウェア教育に関する筆者のこれまでの経験と取り組みについても紹介する.



なお,当日は,「災害対応ロボットセミナー」を開催いたします.こちらも合わせてご参加ください.
参加登録
参加費は無料です
Event Registration and Ticketing Powered by Event Espresso
当日,会場での登録も可能ですので,お誘い合わせの上,ご来場ください.会場受付では皆様にお名刺を頂戴しておりますので,お名刺をご持参くださいませ.
問い合わせ
ブラウザのクッキーを使用可能にして登録ください.社内セキュリティ等の問題で登録作業が行えない場合は,お手数ですが右上の問い合わせフォームより,必要事項をご記入の上,「〇〇セミナー登録希望」とご連絡ください.
登録作業を行うと,返信メールが送られます.1日経っても確認メールが届かない場合は,問い合わせフォームよりご連絡ください.
本ウェブサイト,本セミナーに関する問い合わせも右上の問い合わせフォームよりご連絡ください.
アイキャッチ画像