3月19日 災害対応ロボットワークショップ開催のお知らせ
近年、国内外で発生している自然災害、インフラや産業施設の事故、原子力災害等に対して、災害対応ロボットの活躍が期待されています。
災害対応ロボットを社会で創り育て、定着させるためには、どのような技術や施策、国内外の協力体制の構築等の取り組みが求められるか、その議論を深めるための体系的ワークショップとして
“災害対応ロボットワークショップ(NEDO特別講座)”
を、下記の要領で開催します。
これはNEDO特別講座(ロボット技術経営)の一環として、本年度から来年度にかけて計画しているもので、災害対応ロボットを社会に実装するための研究や技術のみならず、ソリューションや技術経営の観点から取り上げ、紹介するとともに、議論を深めます。本年度まで実施されているNEDOの「災害対応無人化システム研究開発プロジェクト」についても取り上げてまいります。
本案内の最後の部分に今後の計画を記します。
なお、このワークショップの内容は、ロボットソリューションの体系的蓄積を念頭においたロボぺディアにアップロードいたします。本ワークショップへの多数のかたのご参画とともに、のちに後日ワークショップの内容を知っていただく上でも、特に、関連ロボット技術、ロボット教育、そして、ロボット技術経営の観点からも、このロボぺディアもあわせてご活用いただければ幸いです。
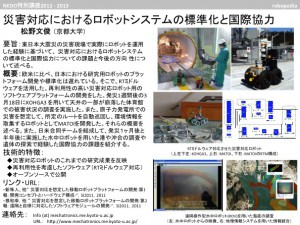
災害対応ロボットワークショップ全体像(敬称略)
7/2 火 田所諭(東北大,災害対応ロボット)
9/3 火 北原成郎(熊谷組,無人化施工)
11/12 火 小柳栄次(千葉工大,移動ロボット)
1/7 火 浦環(東大,水中ロボット)
今回のワークショップ
記
日時:2013年3月19日 15:00-17:30
場所:東京大学本郷キャンパス工学部2号館 31A会議室
*参加費無料
ワークショップ後に懇親会(実費)の開催を予定しております
講演:
①田中 勤氏 原子力災害における災害対応ロボットの活用
②山下 淳氏 災害対応ロボットのための画像処理技術
詳細
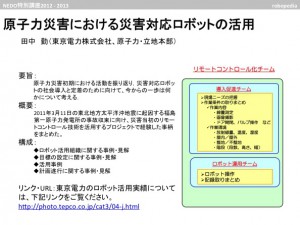
①田中 勤氏 原子力災害における災害対応ロボットの活用
【概要】
原子力災害の初期段階でロボットの活用検討チームの一員であった経験から、災害対応ロボットの活用に参考となる見解を導く。「災害対応ロボットの社会導入と定着のために向けて、今からの一歩は何か」というゴールを設定し、組織、目的、活用事例、計画遂行の4項目について検討を加える。項目の都度、論点を列記する形態とした。
項目1は、ロボットは人が動かしているという観点から、ロボット活用組織に関する事例とし、活躍したチームに触れる。
項目2は、当時のリモートコントロール技術導入目標を紹介し、目標設定の手法や重要性の議論をする。
項目3は、活用事例の紹介である。リモートコントロール技術の全般説明をし、屋内外で活躍した装置を、組合せとして紹介する。
項目4は、計画遂行のため、災害対応ロボットに期待する点についてまとめた。
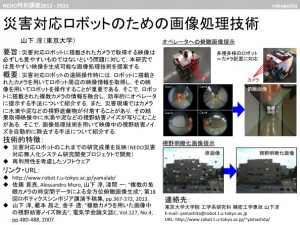
②山下 淳氏 災害対応ロボットのための画像処理技術
【概要】
災害対応ロボットの遠隔操作時には,ロボットに搭載されたカメラを用いてロボット周辺の映像情報を取得し,その映像を用いてロボットを操作することが重要である.このとき,オペレータに提示する情報の質を高めると,遠隔操作性の向上により作業の効率化を図ることが可能である.例えばロボットの前後左右すべての周囲の状況を認識するためロボットに複数のカメラを搭載した場合,全カメラの映像を操作者にそのまま単純に提示しただけでは状況が掴みにくい.そこで画像処理技術を用いて,複数のカメラから得られる映像情報を見やすい映像に変換し,効率的にオペレータに提示する手法について紹介する.また,災害現場ではカメラに水滴や泥などの視野遮蔽物が付着することがあり,その結果取得映像中
に水滴や泥などの視野妨害ノイズが写りこむことがある.そこで,画像処理技術を用いて映像中の視野妨害ノイズを自動的に除去する手法について紹介する.
Event Registration and Ticketing Powered by Event Espresso
写真集




アイキャッチ画像