Apr
01
災害対応ロボットと運用システムのあり方 ~提言概要~(東京大学 淺間 一)
 2011年3月11日に発生した東日本大震災とそれに伴って発生した東京電力株式会社福島第一原子力発電所の事故では、様々な場面においてロ ボットや遠隔操作機器の導入が求められた。福島原発の廃炉に向けて、すでに多くのロボットや遠隔操作機器が活用され、多大な貢献を果たしてい るが、緊急対応においては、必ずしも迅速かつスムーズにそれらが投入できたわけではない。
2011年3月11日に発生した東日本大震災とそれに伴って発生した東京電力株式会社福島第一原子力発電所の事故では、様々な場面においてロ ボットや遠隔操作機器の導入が求められた。福島原発の廃炉に向けて、すでに多くのロボットや遠隔操作機器が活用され、多大な貢献を果たしてい るが、緊急対応においては、必ずしも迅速かつスムーズにそれらが投入できたわけではない。
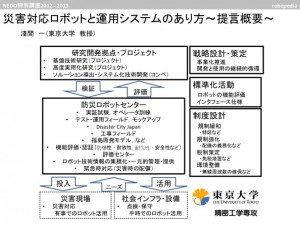
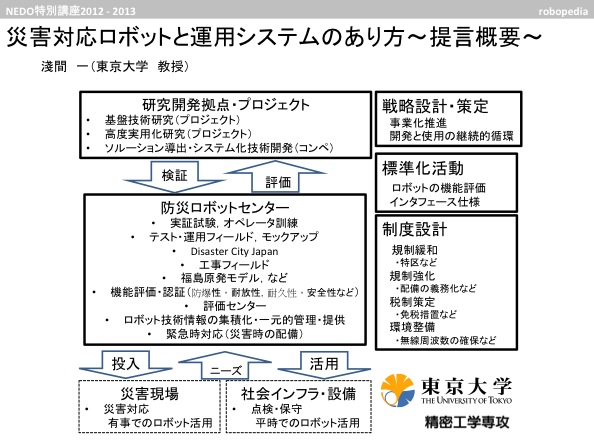
そこで、産業競争力懇談会プロジェクト「災害対応ロボットと運用システムのあり方」では、今後起こり得る自然災害、人工災害に対する備えとし て、いかなるロボット技術開発と運用を行うべきかについて検討し、防災ロボット、無人化施工システムに加え、インフラ点検/メンテナンスロ ボットとの併用も含め、災害対応ロボットの技術的課題抽出と、産業競争力を高めるための開発戦略に関する提言を行った。
本講演では、その概要について述べる。
アイキャッチ画像