ロボット技術に関連した事業を立ち上げられた起業家の皆様より、起業のきっかけとなったコア技術やビジネスモデル、起業時のご苦労、事業の現状などについてご紹介頂くセミナーを開催することとなりました。多数のかたのご出席を募ります。
このセミナーは、ロボット産業の競争力を強化するための議論・研究の場を形成するためのNEDO特別講座の一環として実施するもので、RT周辺研究や人材育成、新規プロジェクトの企画立案を念頭においた人的交流として、ロボットを社会に実装するための技術経営の観点からすすめているものです。
このセミナーで利用されるパワーポイントは、」ロボットソリューションの体系的蓄積を念頭においたロボペディアに集積してゆきます。
http://robopedia.sakura.tv
本ワークショップへの多数のかたのご参画とともに、のちに後日ワークショップの内容を知っていただく上でも、特に、関連ロボット技術、ロボット教育、そして、ロボット技術経営の観点からも、このロボぺディアもあわせてご活用いただければ幸いです。
記
日時:2013年2月28日 13:00〜
場所:東京大学本郷キャンパス工学部2号館2階 221講義室
【講演】
順序には変更がございます
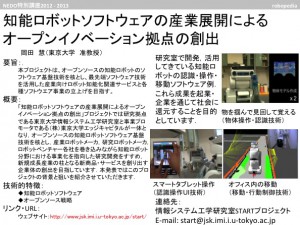
①岡田慧;知能ロボットソフトウェアの産業展開によるオープンイノベーション拠点の創出
②滝野一征;ロボット最適化で工場自動化を強力推進
③徐剛;産業ロボットのための3次元ビジョン~研究開発から社会実装へ~
④宇井吉美:よく生き よく死ぬ 未来つくり
⑤榊原健太郎;IT業界における最近の起業状況及び動向と、日本からグーグル、facebookのようなITサービスを生み出す方法とは?
【詳細】
文部科学省・大学発新産業創出拠点プロジェクトでは,ポテンシャルは高いがリスクも高い大学等の研究拠点におけるシーズ技術に関して,事事業化ノウハウを持った人材(「事業プロモータ」)ユニットを活用し,事業戦略・知財戦略・市場・出口を見据え,ベンチャーの創業を目指した研究開発を実施することを目的として平成24年度から始まった事業です.
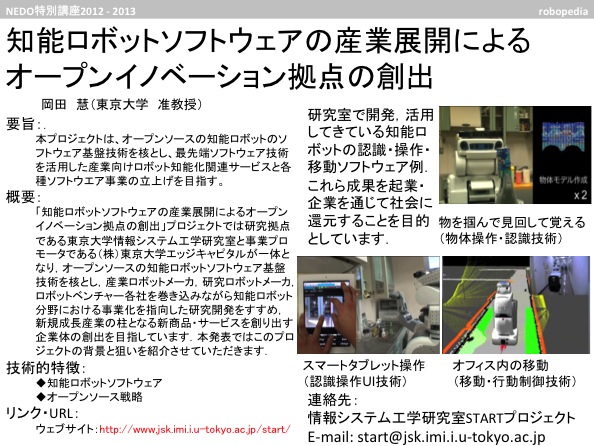
「知能ロボットソフトウェアの産業展開によるオープンイノベーション拠点の創出」プロジェクトでは研究拠点である東京大学情報システム工学研究室事業プロモータである(株)東京大学エッジキャピタルが一体となり,オープンソースの知能ロボットのソフトウェア基盤技術を核とし,産業ロボットメーカ,研究ロボットメーカ,ロボットベンチャー各社を巻き込みながらロボット分野における事業化に向けた開発をすすめ,世界を驚かせるような新商品・サービスを創り出す企業体を創出することで,日本のロボット分野における国際的競争力の向上に質することを目的としています.本講演ではこのプロジェクトの概要を紹介させていただきます.
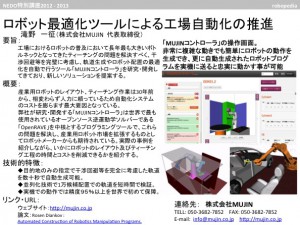
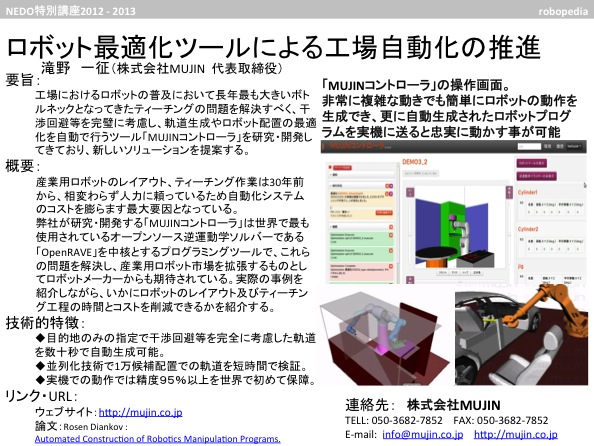
我が国は産業用ロボットの稼働台数、生産シェアともに世界一のロボット大国と言われ、これまで自動車や半導体産業を中心にロボットによる自動化、効率化がすすめられてきました。にも関わらず現状を見ると、ロボットのシステム作成には専門的な知識と経験、または多大なコストがかかるため、工場におけるロボットの活用はいまだ限定的な状況です。ロボットを更に普及させるには自動化コストの大半を占めるインテグレーションコストを削減する事が必要不可欠です。
本問題を解決するため、株式会社MUJINでは世界一の逆運動学解析ソフトであるOpenRAVEを核として、産業用ロボットのプログラミング時間の大幅削減や自動化システムの効率化に大きく貢献するサービスを展開しております。
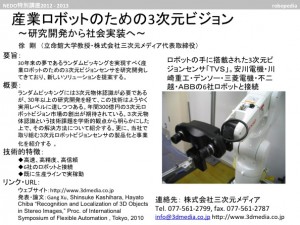
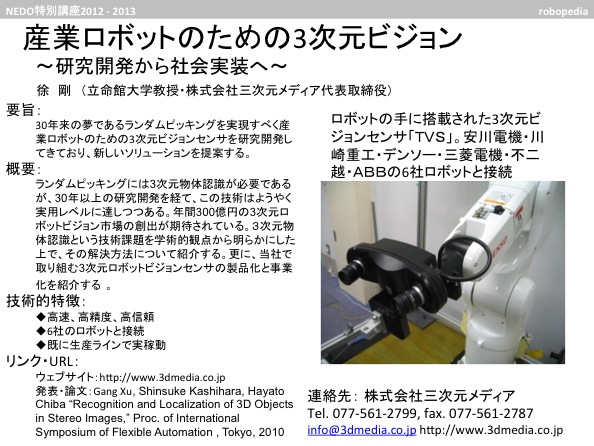
2011年の産業ロボットの世界出荷は史上最高の14万台に達した。ティーチング動作を繰り返すことで実現可能なロボットアプリケーションが
たくさんある一方、部品箱から部品を取り出す単純作業は相変わらず人間が行っている。その自動化には、3次元物体認識をベースにした3次元ビジョンが必要であるが、30年以上の研究開発を経て、この技術はようやく実用レベルに達しつつある。これにより、年間300億円の3次元ロボットビジョン市場が数年後創出されると期待されている。
3次元物体認識という技術課題を学術的観点から明らかにした上で、その解決方法について紹介する。更に、講演者が経営する三次元メディア社で取り組む3次元ロボットビジョンセンサの製品化と事業化を紹介し、技術革新による価値創造においてリーダーに求められる役割について考察、紹介するとともに、議論したい。
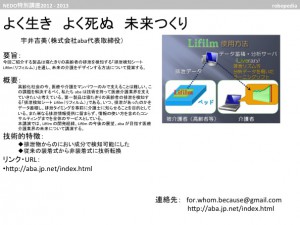
高齢化社会の今、医療や介護をマンパワーのみで支えることは難しい。この課題を解決するべく、私たちabaは技術を持って医療介護業界を支えていきたいと考えている。第一製品は寝たきりの高齢者の排泄を検知する「排泄検知シートLifilm(リフィルム)」である。いつ、排泄があったのかをデータ蓄積し、排泄タイミングを事前に介護士に知らせることを目的としている。また単なる排泄情報提供に留まらず、情報の使い方を含めたコンサルティングまでを全体のサービスとしている。本講演では、Lifilmの開発経緯、Lifilmの今後の展望、abaが目指す医療介護業界の未来について講演する。
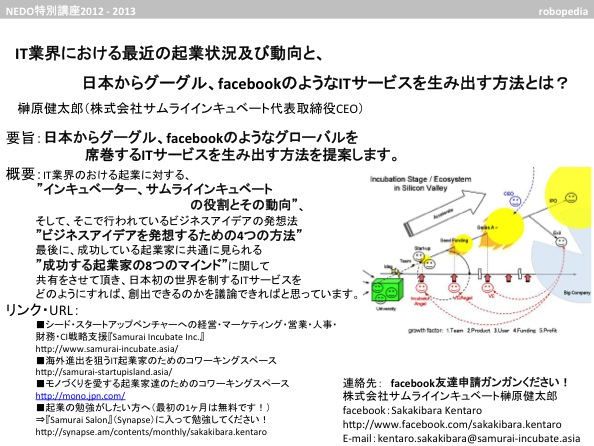
IT業界における起業に対する、”インキュベーター、サムライインキュベートの役割とその動向”、そして、そこで行われているビジネスアイデアの発想法”ビジネスアイデアを発想するための4つの方法”、最後に、成功している起業家に共通に見られる”成功する起業家の8つのマインド”に関して共有をさせて頂き、日本初の世界を制するITサービスをどのようにすれば、創出できるのかを議論できればと思っています。
Event Registration and Ticketing Powered by Event Espresso
写真集