Jul
07

富士通における過去のロボット開発の歴史を踏まえ、社内製造現場における自働化・ロボット適用の状況と今後の方針についてお話させて頂きます。
概要:富士通はMade in JAPANに拘ったものづりを実践しています。 現場では、多品種少量、マス・カスタマイゼーション、短期集中大量生産など、様々なニーズに対応する必要があります。
本セッションでは、富士通社内の製造現場におけるロボット活用の目的、適用状況に関して全体概要を紹介させて頂きます。

RTミドルウェアの産業用機器への応用例として,複数メーカの産業用ロボットを統一された環境で操作するためのコンポーネントの紹介,およびそれを実際の産業用機器を用いて体験することのできる学習教材の開発成果についてご紹介します.
・産業用ロボットを中心とするセル生産システムのORiN-RTM連携アプリケーション開発学習教材
・それを用いた人材育成講座の実施
・RTMを用いた社会実装教育手法の開発とその実践

三菱重工は昨年度のNEDO「災害対応無人化システム研究開発プロジェクト」に参画し狭隘部遠隔重量物荷揚/作業台車(以後ロボット)の開発を担当しました。
このロボットの特徴は、災害現場における高所(8m)マニピュレータ作業を遠隔操作で行える点で、人が容易に近づけない場所での活躍が期待されます。また、狭い建屋の中でも自在に移動できるよう設計する必要が有り、移動機構に4輪駆動4輪操舵台車を採用することで、高い機動性も獲得しました。
講演では、ロボット開発に携わったエンジニア視点による解説と、約10か月という短期間での開発を可能とした工夫や技術等、完成したロボットを見るだけでは分からない秘密をお伝えしたい。
発表資料(PDF)ダウンロード
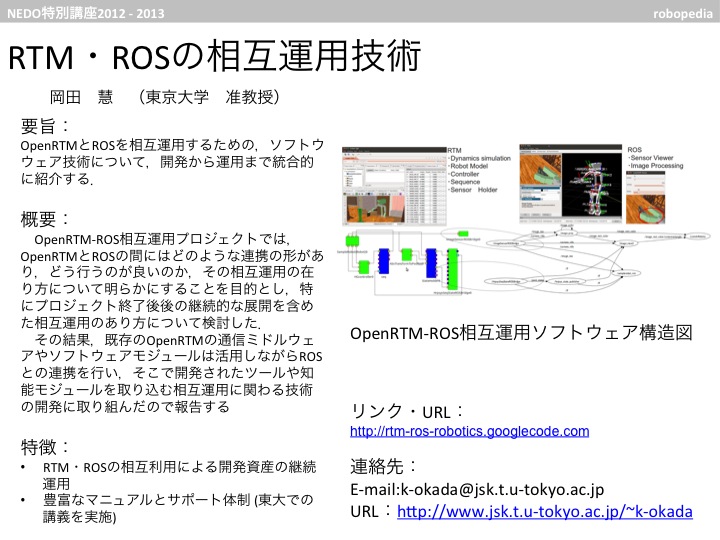
本講演では,NEDO知能化プロジェクトでは技術開発をすすめてきたOpenRTMミドルウェアを基盤としたシステムと,海外で急速にユーザを増やしてきているROSを中心としたロボットシステムの間にはどのような連携の形があり,どう行うのが良いのか,その相互運用の在り方について,既存のOpenRTMの通信ミドルウェアやソフトウェアモジュールは活用しながらROSとの連携を行い,そこで開発されたツールや知能モジュールを取り込むOpenRTM-ROS相互運用ソフトウェアについて,実例やサンプルプログラムを交えて紹介する.
 要旨:
要旨:
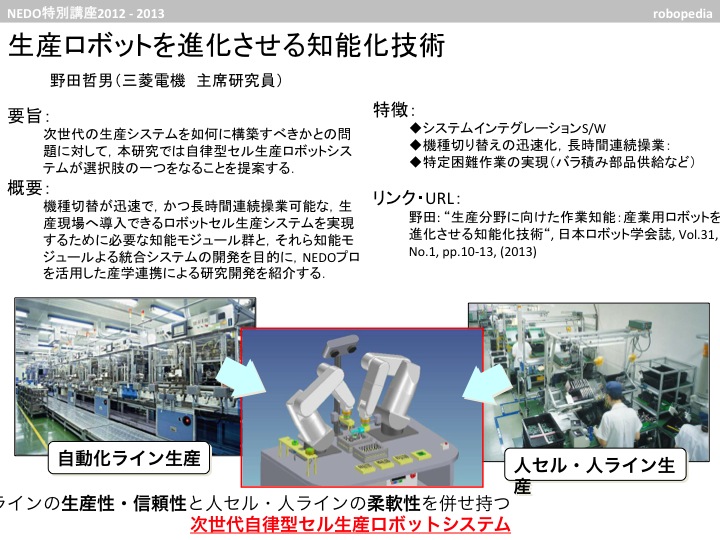
次世代の生産システムを如何に構築すべきかとの問題に対して,本研究では自律型セル生産ロボットシステムが選択肢の一つとなることを提案する.
概要:
機種切替が迅速で,かつ長時間連続操業可能な,生産現場へ導入できるロボットセル生産システムを実現するために必要な知能モジュール群と,それら知能モジュールよる統合システムの開発を目的に,NEDOプロを活用した産学連携による研究開発を紹介する.
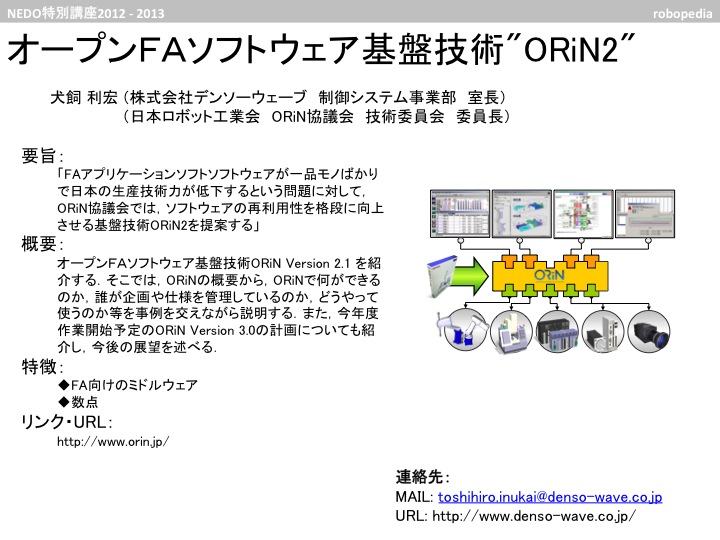 オープンFAソフトウェア基盤技術ORiN Version 2.1 を紹介する.そこでは,ORiNの概要から,ORiNで何ができるのか,誰が企画や仕様を管理しているのか,どうやって使うのか等を事例を交えながら説明する.また,今年度作業開始予定のORiN Version 3.0の計画についても紹介し,今後の展望を述べる.
オープンFAソフトウェア基盤技術ORiN Version 2.1 を紹介する.そこでは,ORiNの概要から,ORiNで何ができるのか,誰が企画や仕様を管理しているのか,どうやって使うのか等を事例を交えながら説明する.また,今年度作業開始予定のORiN Version 3.0の計画についても紹介し,今後の展望を述べる.