近年、国内外で発生している自然災害、インフラや産業施設の事故、原子力災害等に対して、災害対応ロボットの活躍が期待されています。
災害対応ロボットを社会で創り育て、定着させるためには、どのような技術や施策、国内外の協力体制の構築等の取り組みが求められるか、その議論を深めるための体系的ワークショップとして
“災害対応ロボットワークショップ(NEDO特別講座)”
を、下記の要領で開催します。
これはNEDO特別講座(ロボット技術経営)の一環として、昨年度から本年度にかけて計画しているもので、災害対応ロボットを社会に実装するための研究や技術のみならず、ソリューションや技術経営の観点から取り上げ、紹介するとともに、議論を深めます。昨年度まで実施されていたNEDOの「災害対応無人化システム研究開発プロジェクト」についても取り上げてまいります。
本案内の最後の部分に今後の計画を記します。
なお、このワークショップの内容は、ロボットソリューションの体系的蓄積を念頭においたロボぺディアにアップロードいたします。本ワークショップへの多数のかたのご参画とともに、のちに後日ワークショップの内容を知っていただく上でも、特に、関連ロボット技術、ロボット教育、そして、ロボット技術経営の観点からも、このロボぺディアもあわせてご活用いただければ幸いです。
災害対応ロボットワークショップ全体像(敬称略)
11/12 火 吉田智章 (千葉工大,移動ロボット)
1/7 火 浦環(東大,水中ロボット)
主催
独立行政法人新エネルギー・産業技術総合開発機構(NEDO)、国立大学法人東京大学
日時
2013年9月3日 15時40分から18時20分まで(開催の都合により時間が変更となることがあります)
場所
東京大学本郷キャンパス工学部2号館3階31A会議室
ご講演
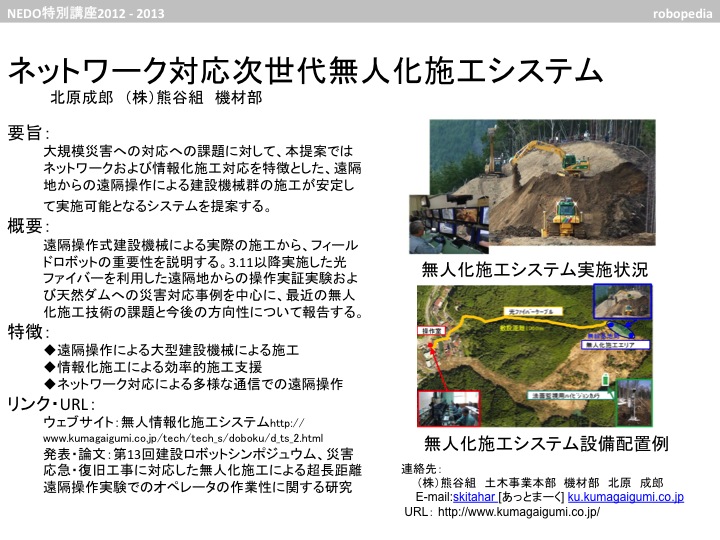
① ネットワーク対応次世代無人化施工システム:株式会社熊谷組 北原 成郎
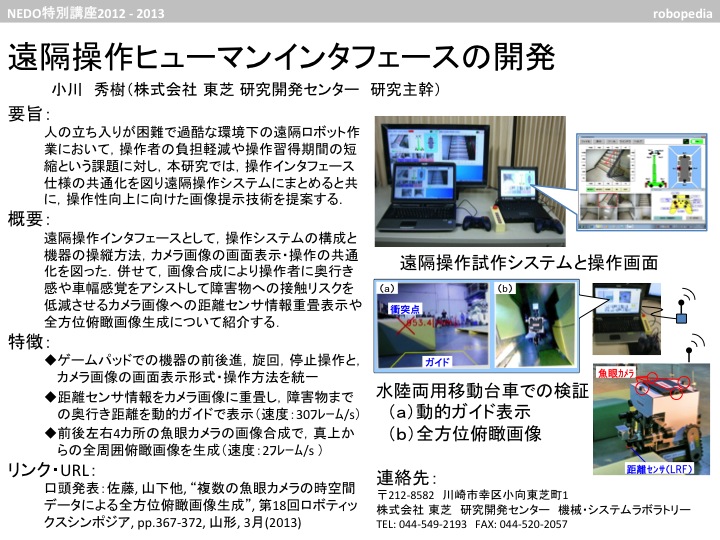
② 遠隔操作ヒューマンインタフェース:株式会社東芝 小川 秀樹
③ 計測・作業要素技術の開発(水陸両用移動装置):株式会社東芝 小舞 正文
詳細
① ネットワーク対応次世代無人化施工システム:株式会社熊谷組 北原 成郎
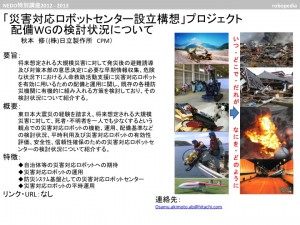
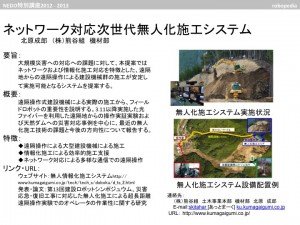 雲仙普賢岳の災害対応以来約20年の歴史がある無人化施工技術は。その技術は進化しており、災害対応能力は向上してきた。東日本大震災以降その技術の役割は注目を集めており、大規模な災害への迅速な対応が求めらえている。近年の情報通信技術の発達により、無人化施工では無線資源の有効利用やシステムの柔軟性からネットワーク技術を有効利用することが重要になっている。
雲仙普賢岳の災害対応以来約20年の歴史がある無人化施工技術は。その技術は進化しており、災害対応能力は向上してきた。東日本大震災以降その技術の役割は注目を集めており、大規模な災害への迅速な対応が求めらえている。近年の情報通信技術の発達により、無人化施工では無線資源の有効利用やシステムの柔軟性からネットワーク技術を有効利用することが重要になっている。
本講演では、遠隔操作式建設機械による実際の施工から、フィールドロボットの重要性を説明する。3.11以降実施した光ファイバーを利用した遠隔地からの操作実証実験および天然ダムへの災害対応事例を中心に、最近の無人化施工技術の課題と今後の方向性について報告する。
② 遠隔操作ヒューマンインタフェース:株式会社東芝 小川 秀樹
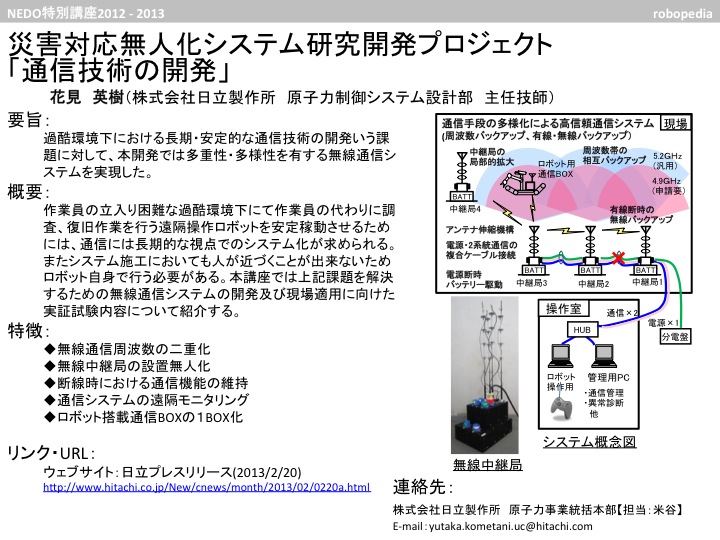
 災害現場において、特に作業員の立ち入りが困難な過酷な環境下にある設備内で活用が期待されるロボットの重要な共通要素技術の1つに、遠隔操作ヒューマンインタフェース技術があげられる。NEDO災害対応無人化システム研究開発プロジェクトにおいても、操作者の負担軽減や操作習得期間の短縮を目的に開発に取り組んだ。ここでは、本プロジェクトに参画したコンソーシアム各社の遠隔機器、ロボットの操作インタフェース仕様の共通化案をまとめ、それを反映した開発成果を紹介する。併せて、遠隔による操作性向上に向け、カメラ画像を基に距離センサ情報重畳表示や全方位俯瞰画像生成など開発した画像提示技術についても紹介する。
災害現場において、特に作業員の立ち入りが困難な過酷な環境下にある設備内で活用が期待されるロボットの重要な共通要素技術の1つに、遠隔操作ヒューマンインタフェース技術があげられる。NEDO災害対応無人化システム研究開発プロジェクトにおいても、操作者の負担軽減や操作習得期間の短縮を目的に開発に取り組んだ。ここでは、本プロジェクトに参画したコンソーシアム各社の遠隔機器、ロボットの操作インタフェース仕様の共通化案をまとめ、それを反映した開発成果を紹介する。併せて、遠隔による操作性向上に向け、カメラ画像を基に距離センサ情報重畳表示や全方位俯瞰画像生成など開発した画像提示技術についても紹介する。
③ 計測・作業要素技術の開発(水陸両用移動装置):株式会社東芝 小舞 正文
 アクセスに困難を伴うような汚濁水が溜まった地下階の調査を想定し、NEDO災害対応無人化システム研究開発プロジェクトにおいて、漏水箇所把握のためのモニタリングデバイスと、そのモニタリングデバイスを搭載することが可能な水陸両用の遠隔移動装置を開発した。また遠隔移動装置の操作を視覚的にサポートする画像処理ソフトウェアを開発した。ここでは、漏水箇所把握のためのモニタリングデバイスとして開発した、音響マイクロフォン、ドップラー流速計および超音波カメラから成る計測システムと本システムを水陸両用移動装置に搭載した組合せ水中試験について紹介する。
アクセスに困難を伴うような汚濁水が溜まった地下階の調査を想定し、NEDO災害対応無人化システム研究開発プロジェクトにおいて、漏水箇所把握のためのモニタリングデバイスと、そのモニタリングデバイスを搭載することが可能な水陸両用の遠隔移動装置を開発した。また遠隔移動装置の操作を視覚的にサポートする画像処理ソフトウェアを開発した。ここでは、漏水箇所把握のためのモニタリングデバイスとして開発した、音響マイクロフォン、ドップラー流速計および超音波カメラから成る計測システムと本システムを水陸両用移動装置に搭載した組合せ水中試験について紹介する。
会場の様子





参加登録
参加費は無料です
Event Registration and Ticketing Powered by Event Espresso
なお,当日は12時40分より,「RTM・RTCセミナー」を開催いたします.こちらも合わせてご参加ください
当日,会場での登録も可能ですので,お誘い合わせの上,ご来場ください.会場受付ではお名刺を頂戴しておりますので,お名刺をご持参くださいませ.
問い合わせ
ブラウザのクッキーを使用可能にして登録ください.社内セキュリティ等の問題で登録作業が行えない場合は,お手数ですが右上の問い合わせフォームより,必要事項をご記入の上,「〇〇セミナー登録希望」とご連絡ください.
登録作業を行うと,返信メールが送られます.1日経っても確認メールが届かない場合は,問い合わせフォームよりご連絡ください.
本ウェブサイト,本セミナーに関する問い合わせも右上の問い合わせフォームよりご連絡ください.
 災害現場において、特に作業員の立ち入りが困難な過酷な環境下にある設備内で活用が期待されるロボットの重要な共通要素技術の1つに、遠隔操作ヒューマンインタフェース技術があげられる。NEDO災害対応無人化システム研究開発プロジェクトにおいても、操作者の負担軽減や操作習得期間の短縮を目的に開発に取り組んだ。ここでは、本プロジェクトに参画したコンソーシアム各社の遠隔機器、ロボットの操作インタフェース仕様の共通化案をまとめ、それを反映した開発成果を紹介する。併せて、遠隔による操作性向上に向け、カメラ画像を基に距離センサ情報重畳表示や全方位俯瞰画像生成など開発した画像提示技術についても紹介する。
災害現場において、特に作業員の立ち入りが困難な過酷な環境下にある設備内で活用が期待されるロボットの重要な共通要素技術の1つに、遠隔操作ヒューマンインタフェース技術があげられる。NEDO災害対応無人化システム研究開発プロジェクトにおいても、操作者の負担軽減や操作習得期間の短縮を目的に開発に取り組んだ。ここでは、本プロジェクトに参画したコンソーシアム各社の遠隔機器、ロボットの操作インタフェース仕様の共通化案をまとめ、それを反映した開発成果を紹介する。併せて、遠隔による操作性向上に向け、カメラ画像を基に距離センサ情報重畳表示や全方位俯瞰画像生成など開発した画像提示技術についても紹介する。