Sep
10
函館高専での取り組み(函館工業高等専門学校生産システム工学科准教授 中村 尚彦)
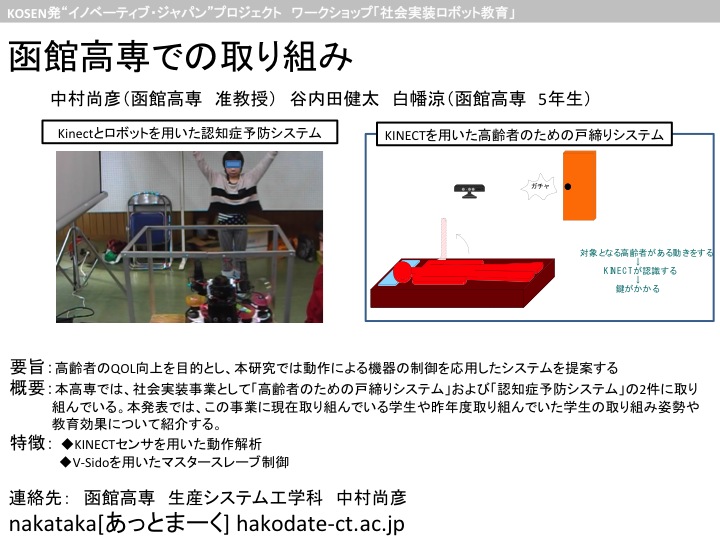 高齢者のQOL向上を目的とし、本研究では動作による機器の制御を応用したシステムを提案する。
高齢者のQOL向上を目的とし、本研究では動作による機器の制御を応用したシステムを提案する。
本高専では、社会実装事業として「高齢者のための戸締りシステム」および「認知症予防システム」の2件に取り組んでいる。本発表では、この事業に現在取り組んでいる学生や昨年度取り組んでいた学生の取り組み姿勢や教育効果について紹介する。
高齢者のQOL向上を目的とし、本研究では動作による機器の制御を応用したシステムを提案する。
本高専では、社会実装事業として「高齢者のための戸締りシステム」および「認知症予防システム」の2件に取り組んでいる。本発表では、この事業に現在取り組んでいる学生や昨年度取り組んでいた学生の取り組み姿勢や教育効果について紹介する。
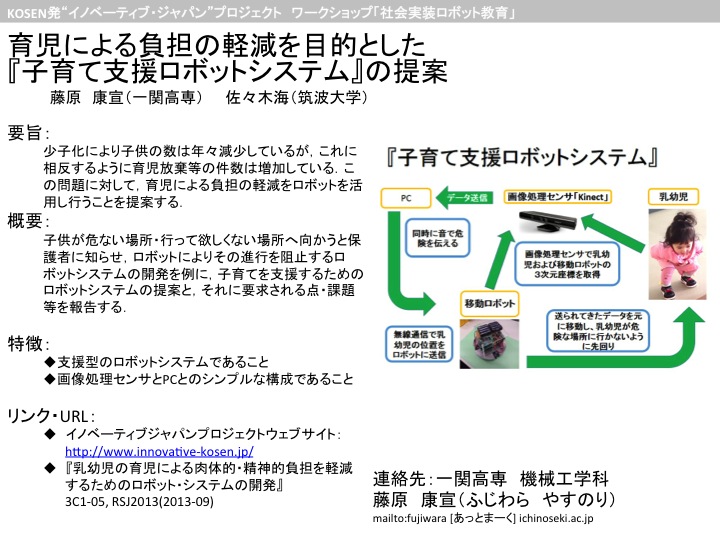 少子化により子供の数は年々減少しているが,これに相反するように育児放棄等の件数は増加している.この問題に対して,育児による負担の軽減をロボットを活用し行うことを提案する.
少子化により子供の数は年々減少しているが,これに相反するように育児放棄等の件数は増加している.この問題に対して,育児による負担の軽減をロボットを活用し行うことを提案する.
子供が危ない場所・行って欲しくない場所へ向かうと保護者に知らせ,ロボットによりその進行を阻止するロボットシステムの開発を例に,子育てを支援するためのロボットシステムの提案と,それに要求される点・課題等を報告する.
 これからの日本のものづくりを支える技術者、その育成そして高専がすべきと考えていることを述べる。
これからの日本のものづくりを支える技術者、その育成そして高専がすべきと考えていることを述べる。
ドラッカーは「生産性を向上させるものは知識である」を公理に据え、「今日求められているものは、知識の裏づけのもとに技能を習得しつづける者であるとし、技能の基盤として理論を使える者は無数に必要」と言った。そして「若者のなかでも最も有能な者、最も知的な資質に恵まれた者、最も聡明な者にこそ、知識に裏づけられた技能を使う能力をもってほしい」と呼びかけました(『断絶の時代』1969)。
フリードマンは「これまでやってきたものづくりの内、新興国に移すべきものは移し、国内では新たな、より高度なものづくりを創り出すことで我が国の産業を再興・発展させていく必要がある。未だ見えていない高度なものづくりの創造に際限はない」と言います(『フラット化する世界』2006)。
ジム・プラマー(スタンフォード大工学部長)は「起業したり、会社で新しい方向を考えたりできるように若い人を育てるのが大学の使命。伝統的な工学教育に替えて、私たちの生活にかかわる課題そのものを見つけるところから始めてビジネスにつなげる。単なる講義ではなく、グループでプロジェクトに取組み、コンペに参加したりする。そうした経験を積むことで、だれもが創造的になり得る。20世紀と違うエンジニアが求められています。環境や医療など、人々の関心の高い課題に創造的に挑むやり方を教える」と述べた(2013年8月朝日新聞記事)。
今こそ技術者教育に力を入れるときです。学問のしっかりした基礎の上に、新たな技術や社会を創り出すイノベーティブな技術者に育てる必要があります。教育熱心な教員を擁する高専はこの教育に適する。ユーザーと価値共創したり、学生が主体的に学び、その面白さを体験し、生涯学び続ける力を獲得するような“仕掛け”、様々なコンテストがその代表、をこれまでに築き上げてきた。またそれをさらにパワーアップする“仕掛け”を現在構築中です。
高専で構築している“仕掛け”をより有効なものにするために、本日は活発なご議論をお願いいたします。
近年、ロボット技術とインターネットやクラウドとの連携が注目されています。本講演では、これらの動向を概観し、2004年よりインターネットやクラウドを用いたロボットサービスに取り組んできたRSi(ロボットサービスイニシアティブ)の活動を紹介致します。具体的には、RSiの成果の一つであるRSNP(ロボットサービスネットワークプロトコル)、運用中のロボットサービス、RTMとRSiの連携の仕組みとその応用サービス、RTコンポーネントのWebコンテンツ化の試み、クラウド向けのマイクロサービス機能や、RSiのロードマップ等を説明致します。これらを通し、RSiやこの分野への理解を深めて頂きたいと思います。
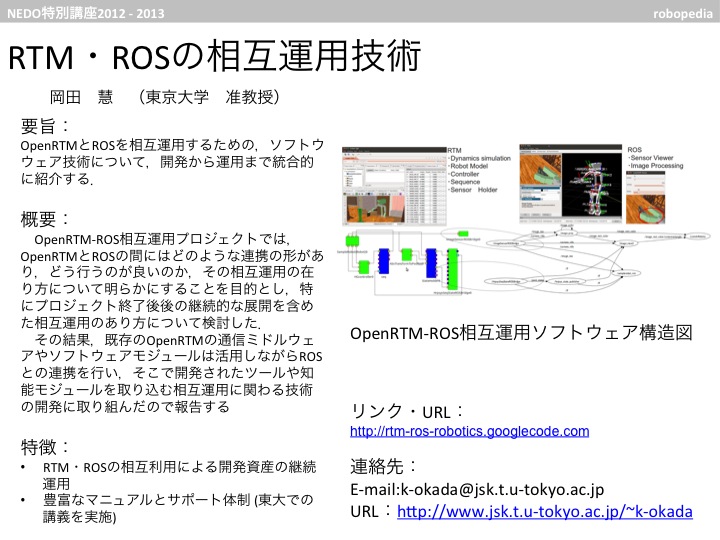
本講演では,NEDO知能化プロジェクトでは技術開発をすすめてきたOpenRTMミドルウェアを基盤としたシステムと,海外で急速にユーザを増やしてきているROSを中心としたロボットシステムの間にはどのような連携の形があり,どう行うのが良いのか,その相互運用の在り方について,既存のOpenRTMの通信ミドルウェアやソフトウェアモジュールは活用しながらROSとの連携を行い,そこで開発されたツールや知能モジュールを取り込むOpenRTM-ROS相互運用ソフトウェアについて,実例やサンプルプログラムを交えて紹介する.
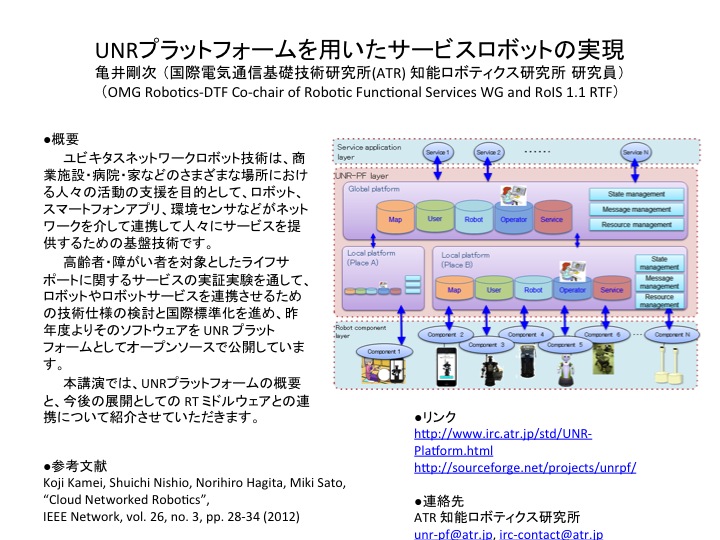
ユビキタスネットワークロボット技術は、 商業施設・病院・家などのさまざまな場所における人々の活動の支援を目的として、ロボット、スマートフォンアプリ、環境センサなどがネットワークを介して連携して人々にサービスを提供するための基盤技術です。
高齢者・障がい者を対象としたライフサポートに関するサービスの実証実験を通して、ロボットやロボットサービスを連携させるための技術仕様の検討と国際標準化を進め、昨年度よりそのソフトウェアをUNRプラットフォームとしてオープンソースで公開しています。
本講演では、UNRプラットフォームの概要と、今後の展開としてのRTミドルウェアとの連携について紹介させていただきます。
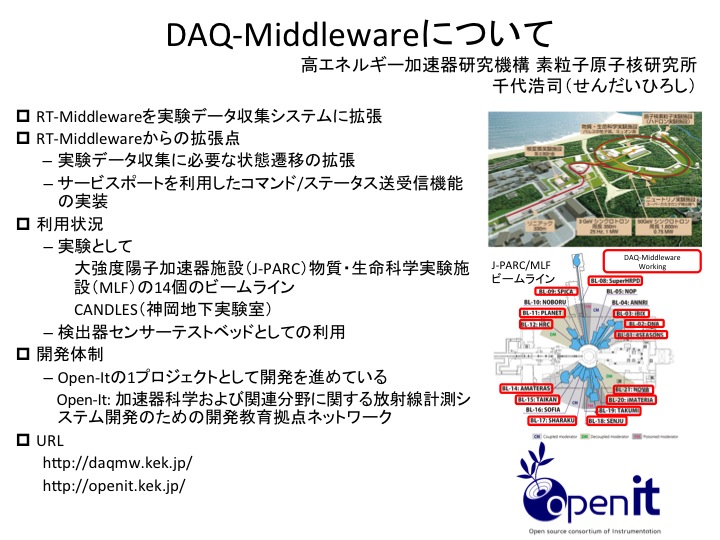
DAQ-MiddlewareはRT-Middlewareを拡張した実験データ収集用ソフトウェア構築のためのフレームワークです。
加速器を使用した実験には素粒子原子核実験、および物質・生命科学実験などのさまざまな実験があります。実験装置(検出器)から得られるアナログ信号をデジタル化し、さらに計算機に取り込みストレージシステムに格納し、オンラインデータ解析を同時に行うデータ収集システムは大変重要なパートです。最近ではたくさんの計算機を利用しネットワーク分散化したシステムとなっています。
DAQ-Middlewareおよび適用事例などを紹介します。
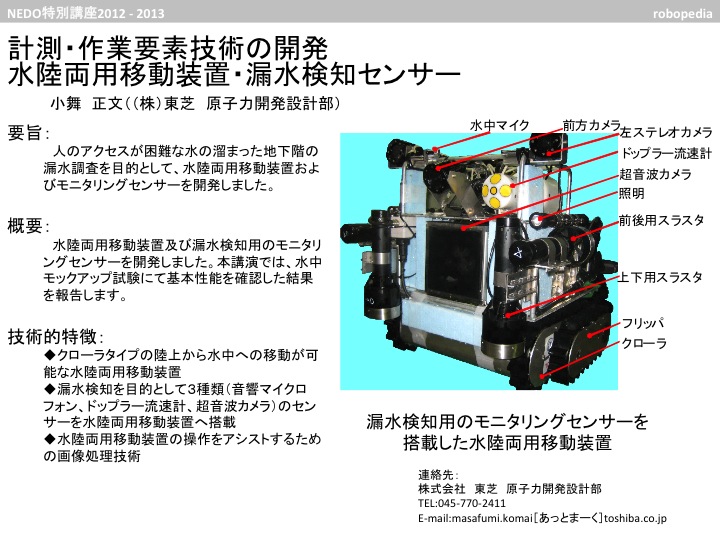
アクセスに困難を伴うような汚濁水が溜まった地下階の調査を想定し、NEDO災害対応無人化システム研究開発プロジェクトにおいて、漏水箇所把握のためのモニタリングデバイスと、そのモニタリングデバイスを搭載することが可能な水陸両用の遠隔移動装置を開発した。また遠隔移動装置の操作を視覚的にサポートする画像処理ソフトウェアを開発した。ここでは、漏水箇所把握のためのモニタリングデバイスとして開発した、音響マイクロフォン、ドップラー流速計および超音波カメラから成る計測システムと本システムを水陸両用移動装置に搭載した組合せ水中試験について紹介する。